


自从人类发明晰转轮,咱们就期望了解怎么经过改动精度进步转轮滚动功率。在曩昔几个世纪,科学家和工程师现已研发了许多办法来完成此方针,期间轮-轴体系的根本原理得到了广泛运用,从轿车、音量旋钮、各种机械方法的齿轮到粗陋的手推车,简直每种机械体系均选用了这一原理[1]。
经过多个年代的探究,人们发现让转轮高效工作的最重要因素并非转轮自身(为何不完全改造它呢?),而是转轮的轴角。现在丈量和优化轴角的最有用办法是选用视点传感器。现有许多种视点传感器都能够经过轮轴监控和改善促进轮周功率优化;但假如合作运用FPGA,您就能够获得十分明显的作用,一起能够进步很多运用中的轮轴/轮周功率。
在具体介绍工程师们怎么最佳运用赛灵思FPGA到达上述意图之前,先让咱们简略回忆一下视点传感器的部分根本原理。现在得到广泛运用便是编码器和分解器这两类视点传感器。
编码器和分解器的类型
编码器分为增量和肯定两个根本类别。增量编码器能够监控轮轴上的两个方位,并且能够在轮轴每次经过这两个方位时发生A或B脉冲。独立的外部电动计数器然后从这些脉冲解读出转速和旋转方向。尽管适用于很多运用,可是增量式计数器的确存在某些缺乏。例如,在轮轴停转情况下,增量编码器在开端运转之前有必要首要经过调回到某个指定校准点来完成自身校准。别的,增量式计数器易遭到电气搅扰的影响,导致发送到体系的脉冲不精确,从而形成旋转计数过错。不仅如此,许多增量编码器归于光电器材 – 假如对方针运用有影响,则无法用于辐射风险区域。

图1 – 分解器转子鼓励
分解器绕组
ROTOR:转子 STATOR:定子
肯定编码器是监控轮轴旋转计数和方向的传感器体系。在根据肯定编码器的体系中,用户一般把转轮衔接到具有电触头或光电基准的轮轴。在轮轴运转时,根据肯定编码器的体系会记载旋转和运转方向,一起发生易于转换成代码(最常见的是二进制码或格雷码)的并行数字输出。肯定编码器的优势在于只需求校准一次(一般是在工厂中校准),而无需每次运用前都校准。此外,肯定编码器一般比其它编码器更牢靠。不过,肯定编码器一般很贵重,并且它们不利于进行并行数据传输,尤其是在丈量其读数的电子体系间隔编码器较远情况下。
分解器就其自身而言是一种旋转变压器——一种输出电压与其所监控的输入轴角仅有相关的模仿器材。它是一款具有0~360旋转视点的肯定方位传感器,其直接衔接到轮轴并陈述转速和方位。分解器与编码器比较有许多优势。分解器十分稳健牢靠,能够饱尝带有尘埃、油污、极点温度、振荡和辐射的严格环境。作为一种变压器,分解器能够供给信号阻隔以及对电气搅扰的天然共模按捺。除了这些特性之外,分解器只需求四根线就可进行角数据传输,这使其能够适用于从重工业、微型体系到航空航天工业等各种运用。
无刷分解器得到了进一步改善,其无需与转子的滑环衔接。因而,这种分解器更牢靠,并且运用寿命更长。
分解器选用两种方法获取与轴角相关的输出电压。在第一种方法中,如图1所示的转子绕组由交变信号鼓励,而输出来自两个定子绕组。因为定子是以机械方法定位到正确视点,因而输出信号起伏是经过轴角的三角正弦和余弦相关。正弦与余弦信号均具有与原始鼓励信号相同的相位;仅其起伏随轮轴的旋转经过正弦与余弦进行调制。
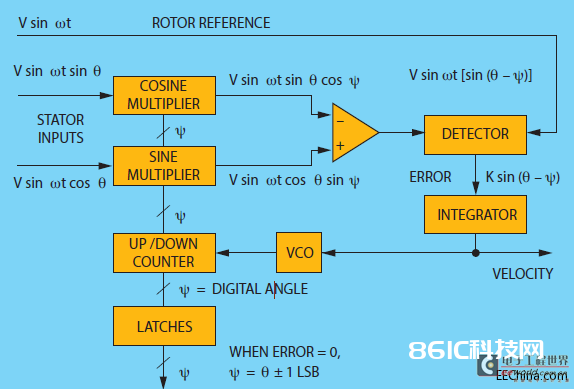
图2 – 分解器数字转换器(RDC)方框图
图中文字如下:
ROTOR REFERENCE:转子基准
STATOR INPUTS:定子输入
COSINE MULTIPLIER:余弦乘法器
SINE MULTIPLIER:正弦乘法器
UP /DOWN COUNTER:递加/递减计数器
LATCHES:锁存器
DETECTOR:检测器
ERROR:差错
INTEGRATOR:积分器
VELOCITY:速度
DIGITAL ANGLE:数字视点
WHEN ERROR = 0:当差错=0
在第二种方法中,定子绕组由相位正交的交变信号鼓励。然后在转子绕组中感应电压。绕组的起伏和频率固定,但其相移随轴角改变。
分解器能够放置到需求丈量视点的方位[2]。而电子设备一般指的是分解器数字转换器(RDC),能够放置到需求丈量数字输出的方位。分解器的模仿输出(含有轮轴角方位信息)然后经RDC转换成数字方法。
典型RDC的功用
一般来说,分解器的两个输出会运用到RDC的正弦与余弦乘法器[3]。这些乘法器结合正弦和余弦查找表以及函数构成乘法数模转换器。图2显现了其功用。
暂时假定开端时递加/递减计数器的当时状况是一个代表实验视点(trial angle)ψ的数值。转换器设法调整数字视点ψ,使其一向等于并盯梢所丈量的模仿视点θ。






