


摘要:以ARM9微处理器S3C2440A为硬件渠道中心,WindowsCE嵌入式操作体系为软件渠道,构建了微型化、便携的差分GPS导航定位体系。在Visual Studio2008开发环境中选用MFC编程技能,编写导航定位软件,经过RS232串口读取差分GPS接纳设备输出的$GPRMC信息,解析后用于显现和导航参数核算。体系在开阔场所进行了实验,运转正常并得到了精度杰出的导航定位成果,具有重要的实用价值。
差分GPS可提供接连、高精度、实时的时刻基准、方位、速度、整周含糊度等数据,被广泛运用于各项海上实验中。在以小型船只如小艇、渔船等为渠道进行某些实验科目时,因为其空间狭小,防护性较差,运用惯例差分GPS接纳机加显控笔记本存在架起不方便、供电困难、溅入海水等问题,而运用手持GPS接纳机又存在精度低、安稳性差、屏幕小、导航不方便等问题。嵌入式体系以其低功耗、小体积、高安稳性和便携等优势,在GPS的运用中占有重要的方位。文中研讨根据嵌入式微处理器体系和WindowsCE5.0的便携式差分GPS导航定位体系。
1 体系的硬件规划
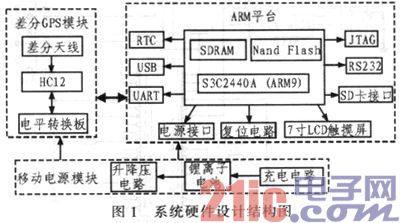
规划的导航定位体系硬件首要由3部分组成:ARM渠道,差分GPS模块,移动电源模块。ARM渠道首要担任整个体系的运转,差分GPS模块担任GPS定位信息的接纳和发送,移动电源模块担任分别给ARM渠道和差分GPS模块供电,硬件构成如图1所示。
1.1 ARM渠道
由根据ARM920T内核的32位高功能嵌入式微处理器S3C2440A、64MB的SDRAM、64MB的Nand Flash的中心板和外围扩展接口资源7寸LCD触摸屏、USB口、JTAG接口、电源接口、复位电路、RTC电路、SD卡接口、1个RS232串口、1个UART接口(3个扩展串口)组成,SDRAM存储器用于运
行体系主程序,Nand Flash存储器具有掉电维护功用,用于存储操作体系内核、Boofloader的发动代码和开发程序,RS232串口COM1可用于和PC机通讯,扩展串口COM0为3.3 VCMOS电平,用于收集差分GPS模块输出的数据信息。选用群创7寸TFT电阻式触摸屏,用于人机交互和显现导航软件信息,USB口用于下载WINCE内核文件及与软件开发主机进行数据交互,JTAG调试接口用于硬件调试和烧载Bootloader。
1.2 差分GPS模块
由加拿大Hemisphere公司的Crescent GPS OEM板HC12、电平转化板和差分天线组成。新月HC12是一款高功能单频12通道接纳机(其中有2个通道专用于盯梢SBAS信号),体积小、功耗低,经过接纳SBAS或外部差分信号,可提供亚米级定位精度,数据输出选用NMEA-0183规范,输出速率可高达20Hz.此接纳机还能够输出原始观测数据,用于后处理解算。在差分信号暂时失锁情况下,其专利的COAST技能能够运用已收到的差分数据坚持30分钟的安稳差分级定位精度。
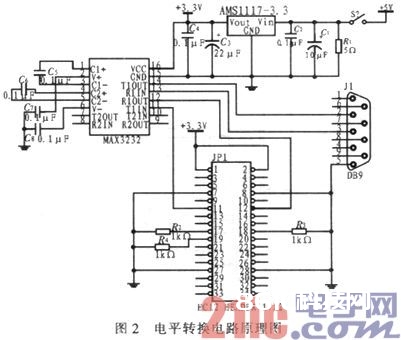
新月HC12有3个全双工3.3 V CMOS电平串口(A,B,C),COM A直接与ARM渠道COM2相连,用于进行HC12参数设置或输出定位数据信息,COM B电平转化为RS232电平后可接入PC机,相同可用于HC12参数设置或输出定位数据信息,COM C串口备用。HC12输入电压为3.3 V,而电源模块输出电压为5 V,需求进行电平转化。电源电压转化选用AMS1117-3.3芯片,串口电平转化选用MAX3232芯片,HC12经过一34Pin(17pin X2)的转接头完成电源供电以及外部通讯,电平转化电路如图2所示。
差分天线选用Hemisphere公司出产的A30天线,该天线可接纳GPS、SBAS和Beacon信号,具有多个波段接纳才能,具有超卓的缓解按捺噪声功能,在高电气噪声和其它被搅扰环境下都能够坚持很好的GPS信号接纳,合适运用在高精密的GPS运用中。
1.3 移动电源模块
由8块2400mAh三星18650圆柱形锂离子电芯和5V升压、维护、充电一体板组成,两个输出端口分别给ARM渠道和差分GPS模块供电,输出电压5 V、电流1 A,其供电时刻大于6小时。
2 体系软件规划
体系的软件是根据WINCE5.0嵌入式操作体系规划的,WINCE是一个多任务、彻底抢占式的32位嵌入式操作体系,具有操作界面杰出、实时性较高、占用资源少、通讯才能强的特色,支撑WINCE MFC、ATL、WINCE API和一些附加的编程接口及各种通讯技能,可充沛满足本软件的技能需求。开发工具选用微软的Visual Studio2008,安装完WINCE5.0的SDK(Software Development Kit,软件开发工具包)后,创立智能设备MFC工程,即可开端软件编写。SDK能够运用规范的,也可自行编译生成。
2.1 软件界面
图3所示为本体系接纳GPS导航数据后处理并显现的软件界面。翻开界面后,在“串口通讯”区进行串口“端口号”和“波特率”设置,点击“翻开”按钮,下方“收到”的编辑框就会不断地显现从差分GPS模块输出的NMEA格局导航数据,勾选“保存数据”可将输出的导航数据以文本格局保存,用于过后数据处理剖析,在“发送”编辑框可凭借NMEA0183指令进行HC12参数设置;在“定位信息”区有经纬度、航向、速度、GPS时刻等参数实时显现,点击“铲除轨道”可将海图显现区前史轨道铲除;“导航信息”区可进行“方针点”增加、修正、删去、画圆、航线等设置,实时显现本船距方针点方位、方位、违背等参数:在“海图操作”区可进行扩大、缩小、本舰居中、方针居中、符号当时点位等操作,勾选“平移海图”后点按左边海图区不动可进行上下左右移动;左边蓝色区域为海图显现区,可直观显现本船与各方针点方位联系、实验态势等。







