


本文首要叙说使用Proteus软件完成的数字式指针温度计的一种调试办法,选用MCS51单片机作为指针温度计的数字信号处理器,其间,温度收集传感器 选用Dallas公司的Ds1820单总线式数字温度传感器,该温度计的温度值经过四个数码管显现,一起还可以经过刻盘指针指示。
选用Dallas公司的Ds1820单总线式数字温度传感器,该温度计的温度值经过四个数码管显现,一起还可以经过刻盘指针指示。
硬件规划
硬件规划包含温度收集模块、单片体系及温度显现模块等模块,其间,刻度盘上指针的操控是规划中的一个要点。在规划数字电路的角位移操控时,一般选用步进电机或伺服电机,选用步进电机时,其步进角固定,一起,关于角位移的操控,会发生操控视点的动作方位不行准确的问题;选用伺服电机也便是舵机时,其操控原理是经过MCS51单片机发生脉宽调制(PWM)信号的占空比来改动舵机摇臂旋转的方位,以到达操控伺服电机的意图,最终在刻度盘上指示温度值。
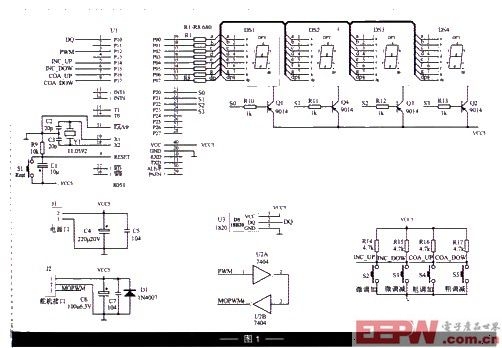
体系硬件电路原理图如图1所示。
1.舵机的作业原理
体系中指针的驱动由舵机完成,为使指针在刻度盘上的初始指示准确,文中选用4个独立按键完成指针刻盘上的粗、微调理。
舵机是一个简略的闭环体系,其内部硬件电路、微型电机及减速器封装在一个部件内,实物图如图2所
示,输出轴可在一90°~90°范围内旋转到恣意视点。
舵机包含操控信号线、电源线和地线3根引线,其反应元件为一个与输出轴同轴的精细电位器,经过电位器的反应信号得到舵机输出轴滚动的方位,然后将相应的电压值反应回操控芯片,最终将反应的输出轴方位与操控引线设定的方位进行比较,得到输出轴方位的误差,然后驱动微型电机滚动,使输出轴转到预订操控的视点。
舵机的操控信号为一列PWM波,周期为18~20ms,舵机输出轴滚动的视点方位与PWM信号占空比呈线性关系,当操控信号的高电平宽度为0.5ms时,舵机输出轴方位为-90°;当信号高电平宽度为2.5ms时,输出轴方位为+90°。

软件规划
单片机软件的规划包含DSl820的读写、模仿PWM输出、单片机温度取值、按键扫描、数码管显现等程序规划。
1.DS1820的读写
DS1820选用单总线协议,可以完成数据的双向传输,在进行DS1820读写操作前应先对DS1820进行复位,一起,有必要严格遵守DS1820的读写时序,尽量精简中止程序,以削减对DS1820的读写时序的影响,进步温度收集的准确性。
DS1820读、写子程序如下:

2.PWM的输出
使用MCS51单片机的定时器中止发生PWM信号,TO每发生一次中止,PWM输出逻辑电平翻转一次,PWM操控信号的输出周期为20ms。






