


此项功用是用来操控一个输出波形,或许指示一段给定的的时刻现已届时。
当计数器与捕获/比较寄存器的内容相一起,输出比较功用做如下操作:
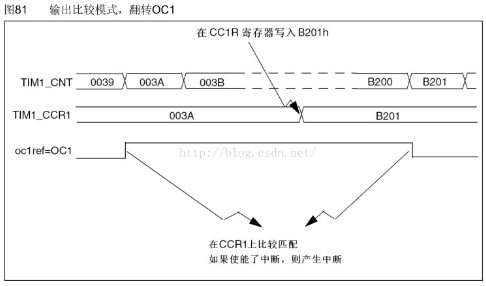
● 将输出比较形式(TIMx_CCMRx寄存器中的OCxM位)和输出极性(TIMx_CCER寄存器中的CCxP位)界说的值输出到对应的引脚上。在比较匹配时,输出引脚能够坚持它的电平
(OCxM=000)、被设置成有用电平(OCxM=001)、被设置成无效电平(OCxM=010)或进行翻转(OCxM=011)。
● 设置中止状况寄存器中的标志位(TIMx_SR寄存器中的CCxIF位)。
● 若设置了相应的中止屏蔽(TIMx_DIER寄存器中的CCxIE位),则发生一个中止。
● 若设置了相应的使能位(TIMx_DIER寄存器中的CCxDE位,TIMx_CR2寄存器中的CCDS位挑选DMA恳求功用),则发生一个DMA恳求。
TIMx_CCMRx中的OCxPE位挑选TIMx_CCRx寄存器是否需求运用预装载寄存器。
● 设置中止状况寄存器中的标志位(TIMx_SR寄存器中的CCxIF位)。
● 若设置了相应的中止屏蔽(TIMx_DIER寄存器中的CCXIE位),则发生一个中止。
● 若设置了相应的使能位(TIMx_DIER寄存器中的CCxDE位,TIMx_CR2寄存器中的CCDS位挑选DMA恳求功用),则发生一个DMA恳求。
TIMx_CCMRx中的OCxPE位挑选TIMx_CCRx寄存器是否需求运用预装载寄存器。
在输出比较形式下,更新事情UEV对OCxREF和OCx输出没有影响。
同步的精度能够到达计数器的一个计数周期。输出比较形式(在单脉冲形式下)也能用来输出一个单脉冲。
输出比较形式的装备过程:
1.挑选计数器时钟(内部,外部,预分频器)
2.将相应的数据写入TIMx_ARR和TIMx_CCRx寄存器中
3.假如要发生一个中止恳求和/或一个DMA恳求,设置CCxIE位和/或CCxDE位。
4.挑选输出形式,例如:有必要设置OCxM=’011’、OCxPE=’0’、CCxP=’0’和CCxE=’1’,当计数器CNT与CCRx匹配时翻转OCx的输出管脚,CCRx预装载未用,敞开OCx输出且高电平有用。
5.设置TIMx_CR1寄存器的CEN位发动计数器
TIMx_CCRx寄存器能够在任何时候经过软件进行更新以操控输出波形,条件是未运用预装载寄存器OCxPE=’0’,不然TIMx_CCRx影子寄存器只能在发生下一次更新事情时被更新)
程序如下:
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_PrescalerConfig(TIM2, 35999, TIM_PSCReloadMode_Immediate);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing;//这个当地便是改比较形式的
可是因为比较形式不管选哪个关于发生中止的作用是相同的,所以选TIMING都能够
TIM_OCInitStructure.TIM_Channel = TIM_Channel_1;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInit(TIM2, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Disable);//
TIMx_CCRx寄存器能够在任何时候经过软件进行更新以操控输出波形,条件是未运用预装载寄存器OCxPE=’0’,不然TIMx_CCRx影子寄存器只能在发生下一次更新事情时被更新)。这儿设置为Disable便是为了后边在中止服务子程序能够修正TIMx_CCR实时起作用~
TIM_OCInitStructure.TIM_Channel = TIM_Channel_2;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OCInit(TIM2, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_OCInitStructure.TIM_Channel = TIM_Channel_3;
TIM_OCInitStructure.TIM_Pulse = CCR3_Val;
TIM_OCInit(TIM2, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_OCInitStructure.TIM_Channel = TIM_Channel_4;
TIM_OCInitStructure.TIM_Pulse = CCR4_Val;
TIM_OCInit(TIM2, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM2, ENABLE);//TIM_OCPreload_Enable
TIM_ITConfig(TIM2, TIM_IT_CC1 | TIM_IT_CC2 | TIM_IT_CC3 | TIM_IT_CC4, ENABLE);
// STM3210B-LK1, set PC.04 – PC.07
GPIO_SetBits(GPIOC, GPIO_Pin_4 |GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7);
TIM_Cmd(TIM2, ENABLE);
while (1)
{
}
}
中止服务子程序:
void TIM2_IRQHandler(void)
{ u16 capture;
u16 CCR1_Val = 1000;
u16 CCR2_Val = 500;
u16 CCR3_Val = 250;
u16 CCR4_Val = 125;
if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);
capture = TIM_GetCapture1(TIM2);
TIM_SetCompare1(TIM2, capture + CCR1_Val);
////设置TIMx捕获比较1寄存器值然后动态修正其CCR的值使整个程序一向进行下去
// PC.04
GPIO_WriteBit(GPIOC, GPIO_Pin_4, (BitAction)(1 – GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_4)));
}
else if (TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
capture = TIM_GetCapture2(TIM2);
TIM_SetCompare2(TIM2, capture + CCR2_Val);
// PC.05
GPIO_WriteBit(GPIOC, GPIO_Pin_5, (BitAction)(1 – GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_5)));
}
else if (TIM_GetITStatus(TIM2, TIM_IT_CC3) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
capture = TIM_GetCapture3(TIM2);
TIM_SetCompare3(TIM2, capture + CCR3_Val);
// PC.06
//GPIO_ResetBits(GPIOC, GPIO_Pin_6);
GPIO_WriteBit(GPIOC, GPIO_Pin_6, (BitAction)(1 – GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_6))); }
else
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC4);
capture = TIM_GetCapture4(TIM2);
TIM_SetCompare4(TIM2, capture + CCR4_Val);
// PC.07
// GPIO_ResetBits(GPIOC, GPIO_Pin_7);
GPIO_WriteBit(GPIOC, GPIO_Pin_7, (BitAction)(1 – GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_7)));
}
}
在STM32的某些运用中,用户有周期性履行某些程序的要求,运用守时器能够发生固定的时刻周期,满意这样的需求。
STM32相关特征:
STM32高档守时器TIM1、TIM8,通用守时器TIM2、TIM3、TIM4、TIM5;守时器最大时钟72MHz,合作预分频,供给灵敏的时钟周期;每个TIM有4个独立捕获/比较通道,DMA/中止功用;通道作业在输出比较守时形式,一个TIM至多能够供给4个不同的守时周期。
原理:TIM某输出/捕获通道作业在输出比较守时形式,计数器计数至比较值时发生中止,在中止中改写捕获比较寄存器,这样在相一起刻距离后可发生下一次中止
TIM2时钟设置为36MHz,预分频设置为2,运用输出比较-翻转形式(Output Compare Toggle Mode)。
TIM2计数器时钟可表达为:TIM2 counter clock = TIMxCLK / (Prescaler +1) = 12 MHz
设置TIM2_CCR1寄存器值为32768,则CC1更新频率为TIM2计数器时钟频率除以CCR1寄存器值,为366.2 Hz。因而,TIM2通道1可发生一个频率为183.1 Hz的周期信号。
同理,依据寄存器TIM2_CCR2 、TIM2_CCR3和 TIM2_CCR4的值,TIM2通道2可发生一个频率为366.3 Hz的周期信号;TIM2通道3可发生一个频率为732.4 Hz的周期信号;TIM2通道4可发生一个频率为1464.8 Hz的周期信号。
#include “stm32f10x_lib.h”
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
vu16 CCR1_Val = 32768;
vu16 CCR2_Val = 16384;
vu16 CCR3_Val = 8192;
vu16 CCR4_Val = 4096;
ErrorStatus HSEStartUpStatus;
void RCC_Configuration(void);
void GPIO_Configuration(void);
void NVIC_Configuration(void);
int main(void)
{
#ifdef DEBUG
debug();
#endif
RCC_Configuration();
NVIC_Configuration();
GPIO_Configuration();
TIM_TimeBaseStructure.TIM_Period = 65535; //这儿有必要是65535,设置计数溢出巨细,每计1个数就发生一个更新事情
TIM_TimeBaseStructure.TIM_Prescaler = 2;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; //管脚输出形式:翻转(TIM输出比较触发形式)
TIM_OCInitStructure.TIM_Channel = TIM_Channel_1;






