


一、项目概述
1.1 项目摘要
提出了一种使用安装在舰船上的三重量磁传感器进行地磁场丈量的设想,处理了在恣意的舰船姿势下,消除丈量中舰船磁场搅扰的问题。该测试仪选用地磁模块来丈量磁场的三重量值,选用3轴陀螺仪来进行恣意的舰船姿势所包含的横摇,纵摇和航向三种状况信息,对收集到的数据进行核算,然后得到地磁场的三重量值。一起 该模块还包含压力传感器和温度传感器,能够实时检测海面上的气压以及温度状况。
1.2 项目布景/选题动机
“测地磁消舰磁”是舰载消磁体系所选用的消磁办法,如果能预先丈量出舰船飞行海域的地磁场值并树立数据库,那么舰船在飞行的过程中就能够依据当地的地磁场值来进行消磁体系的电流调整,然后改进舰载消磁体系的操控办法。
现在,地磁场数据的取得主要是通过树立地磁形式组的办法。世界地磁学与高空大气物理协会的一个专门小组每5年发布一次世界地磁参考场,我国则每10年出书一次我国地磁图。这2种田磁场模型的树立,其数据大多来自陆地上的地磁台站,而海洋上的特定地址的地球磁场还受当地的地舆结构等许多要素的影响而具特殊性。这就导致了全球地磁场模型和部分地磁场模型都不能及时精确地描绘海洋地磁场。因而,用于舰载消磁体系的电流调整时形成的差错比较大。为了更精确地取得海洋上特定地址的地磁场值,能够在海洋上进行实地丈量。
现在在海洋上进行的磁场丈量主要是取得磁场总量,但在舰载消磁体系进行跨纬度调整等使用中,需求的却是三重量的地磁场。磁场的三重量值能够使用安装在舰船桅杆上的6轴地磁模块进行丈量,但这样测得的磁场值并不是地磁场值,而是一个包含了舰船本身磁场和传感器本身搅扰的杂乱的磁场值,而且受舰船姿势的影响,其值也是改变的,因而能够使用3轴陀螺仪来丈量舰船的3个姿势角,再通过数学建模的办法,从一个杂乱的三重量磁场值中别离出地球磁场。
二、需求剖析
2.1 功用要求
1, LPR430AL轴陀螺仪(横滚,俯仰)能够检测舰船横摇,纵摇信息并输出,LY330ALH陀螺仪(偏航)能够检测舰船航向视点并输出。
2, LSM303DLH地磁模块能够检测到舰船地点处地磁场信息输出。
3, 终究输出信息还包含通过去除固定搅扰之后的地磁场信息。
4, 压力传感器和温度传感器能够实时检测海面上的温度和气压,并输出。
2.2 功用规范
最终通过软件核算结果,地磁场的水平重量和笔直重量的差错不超越50nT,磁偏角差错不超越0.3°。
三、方案设计
3.1 体系功用完成原理(除图片外需有文字介绍)
-
磁传感数学模型剖析
关于装在丈量船上的磁传感器来说,其接纳的磁场值为:
 (1)
(1)
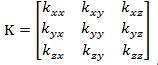
式中:E为单位矩阵;K为感应磁化系数矩阵; 分别为地磁场水平重量和笔直重量;A为恣意姿势下丈量船坐标系与地磁坐标系的转化矩阵;向量 为各种固定搅扰量的组成。矩阵A各元素表达式分别为:
分别为地磁场水平重量和笔直重量;A为恣意姿势下丈量船坐标系与地磁坐标系的转化矩阵;向量 为各种固定搅扰量的组成。矩阵A各元素表达式分别为:
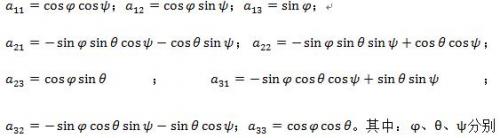
为丈量船的纵倾角、横摇角和磁偏向角。矩阵K能够详细表明为:
剖析(1)式能够知道,要丈量的量 `
` `
` (实际上要丈量的是磁偏角,仅仅丈量出磁航向角 后,就能够与导航设备供给的航向角做差求出磁偏角),向量h是能够从磁传感器中直接读出的
(实际上要丈量的是磁偏角,仅仅丈量出磁航向角 后,就能够与导航设备供给的航向角做差求出磁偏角),向量h是能够从磁传感器中直接读出的 , 首要应该丈量出感应磁化系数矩阵K和固定搅扰向量
, 首要应该丈量出感应磁化系数矩阵K和固定搅扰向量 。
。






