


现在,便携式移动机器人全自主操控办法尚不老练,其监控体系遍及选用人在环半自主操控办法规划。为满意带着、体系小型化、嵌进式的结构特色,故规划便携式移动机器人手持监控体系,并将其用于履带结构便携式移动机器人试验渠道。
功用规划
手持监控体系对便携式移动机器人起到监督与操控的大局性效果。手持监控体系可划分为视频图画监督模块、状况信息监测模块、远控指令模块、无线通讯模块、数字与图交互模块、大局途径规划模块六大功用模块(见图1)。
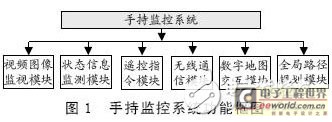
视频图画监督模块对便携式移动机器人所在环境进行视频监督;状况信息监测模块对机器人本身状况信息的监测;远控指令模块完结根本的运动指令编码以及发送;无线通讯模块完结运动指令、状况信息、视频信号等数据的无线传输;数字舆图交互模块完结环境地理信息的数字化显现及人机交互功用;大局途径规划模块完结点到点的最优途径查找功用。
硬件体系
手持监控体系的硬件体系可划分为若干模块,各个模块完结本身相对独立的功用。
硬件结构与接口
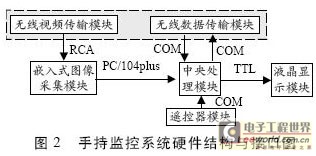
手持监控体系硬件体系选用依据嵌进式体系的PCI 总线的PC/104plus 总线结构,分为无线通讯、嵌进式图画收集、中心处理、远控器、液晶显现等五大模块。无线通讯模块又划分为无线数据传输和无线视频传输模块。无线数据传输模块完结运动指令、状况信息等窄带数据无线传输;无线视频传输模块完结视频图画信号等宽带数据无线传输。
硬件体系各模块经过接口完结信息交流与数据同享。中心处理模块经过PC/104plus 总线与嵌进式图画收集模块接口,完结模块之间视频图画数据的传输。中心处理模块与无线数据传输模块及远控器模块经过串口衔接。中心处理模块经过TTL接口与液晶显现模块衔接。嵌进式图画收集模块与无线视频传输模块经过RCA 接口完结复合视频信号的传输(见图2)。
硬件模块完结
无线数据传输模块选用微功率无线数据传送单元完结。嵌进式图画收集模块选用PC/104plus总线结构的嵌进式图画收集卡完结。中心处理模块选用PC/104plus总线结构的单板机完结。远控器模块经过自行规划电路板完结按键扫描、指令编码以及串口发送等功用。液晶显现模块选用小型五颜六色液晶屏完结。以上各硬件模块完结契合手持设备小型化、便携式的硬件要求。
软件体系
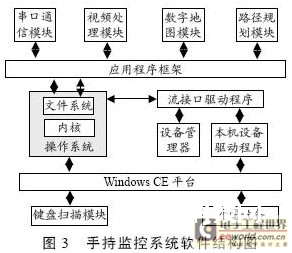
手持监控体系的软件体系选用Windows CE(WinCE)作为嵌进式操作体系渠道,监控体系软件包含:操作体系定制、设备驱动程序开发、运用程序。运用程序又分为:键盘扫描模块、串口通讯模块、视频处理模块、数字舆图模块、途径规划模块五大模块(见图3)。
操作体系定制
操作体系定制首要依据体系需求树立操作体系渠道并对其进行相应的装备。经过渠道裁剪东西Platform Builder(简称PB)完结。
设备驱动程序开发
WinCE的驱动程序分为:本机设备驱动程序和流接口驱动程序[5]。本机设备是指集成到方针渠道的设备,其驱动程序由原设备制造商(OEM)供给。流接口驱动程序是指衔接到WinCE渠道的外部设备驱动程序,由用户自行开发。流接口驱动程序把外部设备看作文件体系的特别文件,经过文件读取函数间接地拜访外部设备。
嵌进式图画收集卡驱动程序分为三部分:
(1) 内核部分
完结中止服务例程(ISR)。内核函数完结了物理中止号与逻辑中止标识之间的映射联系,并调用中止服务例程,中止服务例程在中止产生后向内核回来中止逻辑标识。
(2) 驱动程序部分
完结WinCE 流接口驱动模型所需求的文件操作接口函数,包含:收集卡初始化、数据读取和收集卡句柄关闭。
(3) 运用程序部分
经过调用设备注册函数将嵌进式图画收集卡中止驱动程序加载到体系内存,并依据收集卡初始化参数设置修正WinCE体系注册表文件。
运用程序规划
键盘扫描模块及串口通讯模块单片机程序在单片机集成开发环境uVision2下用C言语开发外,其他模块均在EVC(Windows CE Embedded VisualC++)下开发。
(1) 键盘扫描模块
键盘扫描模块首要完结单片机对薄膜键盘的按键辨认及键值显现功用。薄膜键盘归于行列式非编码键盘,按键的辨认一般选用逐行扫描查询法完结。程序选用软件延时的办法处理颤动。键值显现则经过单片机对液晶屏串行数据口编程完结。
(2) 串口通讯模块
串口通讯模块首要完结单板机与单片机之间的串行数据通讯功用。该模块包含单板机串口通讯程序、单片机串口通讯程序、串口通讯协议三部分。
① 单板机串口通讯程序。因为WinCE不支持串口通讯控件的运用,所以EVC下的单板机串口通讯程序开发只能经过调用文件操作函数完结。






