


导言
跟着我国大型农业机械装备现代化进程的不断推动,农业机械作业信息滞后、时效性差,机收的组织者和参与者对信息方便、精确、具体的要求难以满意等问题日益突显,一起现在大型农业机械本身短少有用的作业状况要害信息收集与毛病诊断报警手法,致使无法及时把握其作业状况与寿数状况,降低了农业机械作业效率和作业质量,影响了农业机械装备的开展。
CAN(controller area network)总线凭其牢靠的数据通讯和杰出的过错检测才能,在操控和检测范畴备受注重,被广泛运用在环境温度恶劣、电磁辐射强和振荡大的工业环境。CAN为分布式操控体系完结各节点之间实时、牢靠的数据通讯供给了强有力的技能支撑。
现在,CAN总线协议已经成为轿车计算机操控体系和嵌入式工业操控局域网的规范总线,但在大型农业机械装备范畴鲜有成功运用报导。
本文以4MZ一6A型六行采棉机智能监控体系为例,经过解析报文标识符帧ID和数据帧意义,研讨依据CAN总线运用层协议的拟定准则和办法。
1 智能监控体系架构及通讯
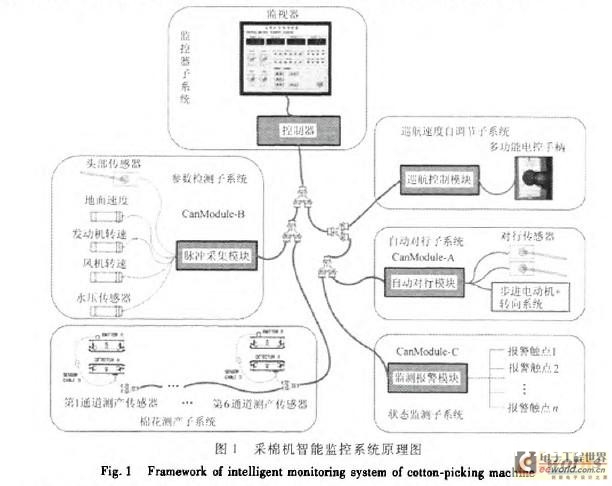
采棉机智能监控体系是依据CAN总线技能树立的数字式模块化的归纳信息管理与操控渠道。监控体系全体架构(图1)由6个子体系构成,别离为监控器子体系、主动对行子体系、参数检测子体系、状况监测子体系、棉花测产子体系和巡航速度自调节子体系。在依据CAN总线的采棉机智能监控体系中,各子体系之间以及子体系内各模块间均经过总线进行信息交流,包含采棉机的发动、中止、速度给定以及参数丈量、状况监测、棉花产值测定等。
监控器于体系置于采棉机驾驭室内部,是整个监控体系的中心,即中心操控器。监控器不只能够接纳底层各CAN节点发来的参数信息和作业状况信息,而且经过CAN总线向各操控节点发送指令和数据信息。由6组近红外棉花流量智能传感器组成的棉花测产子体系担任把棉花实时产值转换为数字量,并经模型校对,经过CAN总线发送给监控器和巡航速度自调节子体系。别的,采棉机智能监控体系还包含若干依据CAN总线的各类功用模块。例如:主动对行模块(CanModule.A)用来完结采棉机巡航作业时的主动对行功用;脉冲收集模块(CanModub-B)用来获取行走速度、发动机转速、风机转速、滚筒转速以及水压、油温等参数信息,并经过CAN总线发送给监控器用来显现和处理;监测报警模块(CanModule—C)担任监测各被测点的开关量信息和模仿电压量信息,比方各路吸人门状况、离合器状况、棉花输送带状况等。
采棉机智能监控体系通讯信息分为指令和数据2类。指令信息,如速度设定、巡航切换、卸棉、主动对行发动等,其优先级比数据信息高。数据信息,如棉花实时产值、发动机转速、采棉头滚筒转速、水箱压力、开关量报警信息等,其优先级相应低一点。不同的子体系发送的数据信息也有优先级之分,如采棉机本身的参数信息和作业状况报警信息就比近红外棉花流量传感器发送的产值信息优先级高;监控器即中心操控器节点的优先级最高,而底层辅佐节点优先级最低。
监控体系中有的信息要求周期性传送,如发动机转速、风机转速等机器参数信息。有的信息归于事情触发发送,如吸入门、离合器等报警信息以及发动、巡航切换等操控指令信息。监控体系中各子体系的通讯使命各有轻重,相对而言,中心操控器节点的通讯最繁忙,而主动对行子体系的通讯很少,一旦主动对行使命发动,子体系本身就可完结主动对行使命。别的,各子体系发送指令和数据信息的字节数都很少,大部分为1至2个字节,很合适CAN总线短帧快速的传送方法。
2 通讯协议的拟定与完结
采棉机智能监控体系选用模块化、总线化规划,层次明晰,便于保护,具有杰出的互换性。依据大型六行采棉机实践需求,智能监控体系共需1只CanModule—A模块、8只CanModule.B模块、4只CanModule—C模块、6对近红外棉花流量智能传感器和1套依据CAN总线接口的行走速度操控模块。由于监控渠道触及的操控模块较多,数据传送量大,因而有必要明晰界说CAN总线运用层协议,以保证监控体系各模块之间正确、实时通讯。
2.1 整体状况
本体系协议选用CAN 2.0B支撑29位标识符的扩展帧。通讯速率可依据实践调试状况设置成125、250、500 kb/s等多种总线波特率,暂定选用250 kb/s进行通讯。各节点的信息交流只运用数据帧,长途帧不用于数据恳求,仅限于节点的自行调试。29位扩展帧包含11位根本ID(即规范帧)和18位扩展ID。根本11位ID依照ID28到IDl8的次序发送,它界说了扩展帧的根本优先权,其值越小代表优先级越高,其值越大代表优先级越低;18位扩展ID依照IDl7到ID0的次序发送。
CAN总线协议将通讯信息分为2种根本类型:专有信息和播送信息。专有信息是由某一节点发送且仅供某一指定节点接纳的点对点信息;播送信息可由恣意节点宣布,其他一切节点都接纳或只要部分多个节点挑选性地接纳。播送信息的优先级要高于专有信息,且依据其发送节点的不同具有不同的优先级(即优先级是依据节点的)。相同,节点的专有信息也依据信息内容的重要程度分为不同的优先级。
当采棉机敞开,监控器上电发动,经时刻继电器延时必定时刻后,近红外棉花流量传感器、主动对行模块(CanModule—A)、脉冲信号收集模块(CanModule—B)、多路监测报警模块(CanModule—C)
等节点一起发动。监控器首先向棉花流量传感器发送指令和数据,一起接纳来自传感器节点的数据信息,完结对近红外流量传感器的校准标定,然后不断地获取来自流量传感器的数据信息。监控器和传感器之间的通讯是面向衔接的,相当于客户机/服务器,传感器接连地产生产值数据,监控器不停地承认收到的数据信息,发送和接纳之间树立点对点的通讯,流量传感器不再与体系内其他CAN节点进行信息交流。
在监控器与流量传感器点对点通讯时,其他检测和监测模块(如CanModule—A、CanModule.B、CanModule—C等)也与监控器进行实时通讯。它们向监控器发送的都是播送帧,进行无承认形式的信息传输,其通讯方法相当于生产者/顾客联系,各模块不停地播送数据信息,监控器或许体系各节点经过辨认总线上信息的标识符来完结信息通讯。
2.2 报文结构
CAN运用层协议拟定有较大的灵活性。本协议以CAN 2.0B为根底,在此根底上对29位标识符进行界说。标识符的分配选用了预界说分配方法(表1)。

(1)优先级:由ID28一ID24组成。为便于扩展,将00000、00001两个优先级空缺,留作备用。监控器与行走速度操控模块之间的通讯优先级界说为00010,为最高优先级,因一旦呈现异常状况,手动驾驭切换和速度操控有必要得到及时呼应;监控器与CanModule—A类模块发送指令设置为0001 I,为次高优先级,当发动巡航采棉形式时,监控器有必要对CanModule.A模块宣布操控指令,同理,CanModule.A模块向监控器发送的数据信息也设置相同的优先级;CanModule-C类模块向监控器发送数据的优先级设置成00100,该类模块发送的是毛病报警信息,也需求较高的优先级,以保证采棉机呈现毛病报警时及时呼应;CanModule—B类模块向监控器发送信号的优先级为00101,该类模块发送的是采棉机作业参数信息,如发动机转速、风机转速、滚筒转速、润滑液注入量等参数;近红外棉花流量智能传感器的优先级设置为001 10,为最低优先级。
(2)方针节点与源节点:IDl5一ID8为方针节点地址,ID7一ID0界说为源节点地址。在本体系中,监控器的节点地址界说为F5,CanModule-A模块的节点地址为A0,CanModule—B的8只模块节点地址别离为BO—B7,CanModule—C的4只模块别离界说为CO、C1、C2、C3,6只棉花流量智能传感器的节点别离界说为DO—D5(以上均为十六进制地址)。






