


300瓦以下的小功率马达合适以MCU做为操控计划,在各家MCU硬件标准差异化日渐缩小之下,软件演算规划就显得相形重要,若能把握MCU操控各种直流马达的软件规划准则,将能大幅提高马达操控的精准度。
运作在300瓦(W)以下的小功率马达被广泛运用于各类运用,例如轿车体系、打印机、复印机、碎纸机、玩具、工厂自动化、测验设备、机器人技能、航空航天与军工等。最盛行的小功率马达类型是直流(DC)马达、无刷直流马达(BLDC)和步进马达。马达的产值大致与功率巨细成反比,量产的小功率马达数量远远高于大功率马达数量。
专用于马达操控的数字信号处理器(DSP)规划首要在满意大型脱机式马达的需求。脱机马达一般为沟通(AC)感应或无刷直流马达,运转在110-480VAC和1/4-100马力(HP)。专用于马达操控的DSP,关于小功率马达操控体系来说,本钱太高。
本文供给运用微操控器(MCU)操控各类马达的软件典范。尽管这些典范相对简略,但其针对各类马达供给有用的解决计划。一个传统的马达操控体系一般要求额定特性并具有更高的杂乱度。这些软件典范能够做为开发更杂乱马达驱动体系的根底。
凭借软件演算 DC有刷马达功耗下降
DC马达在小功率马达中是最常见和最廉价的。在本文中,DC马达首要指的是有刷换向永磁直流马达。
DC马达的特性使其成为变速体系中最简略易运用的马达。DC马达的转矩-速度特性如图1所示,DC马达的非负载速度与马达电源电压成线性联系。驱动安稳扭矩负载、线性负载或指数负载的DC马达的电压-速度特性也是接连的、正斜率的和可猜测的,因而,在大多数情况下,运用敞开回路操控体系是可行的。简略地改动经过马达的电压,任何人都能够操控马达的速度。脉宽调变(PWM)能够用于改动马达供电电压,加载到马达的均匀电压与PWM作业周期比成正比例联系(这儿疏忽马达电感和不接连运转导致的非必须影响)。
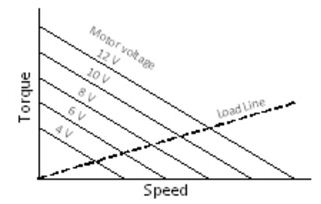
图1 DC马达特性
这儿供给一个以MCU操控DC马达的简略比如。在这个典范中,运用模仿数字转换器(ADC)读取电位器的方位信息,并运用PCA 8位PWM形式输出对应的PWM信号(图2)。

图2 DC马达驱动电路
单个N通道功率金属氧化物半导体场效晶体管(MOSFET)Q1用于驱动DC马达。功率MOSFET应当依据特定的马达电压和电流需求进行挑选。飞轮二极管的D1跨接到DC马达。当MOSFET封闭时,电流经过马达自感持续活动,MOSFET漏极电压将上升到超越马达电源电压的一个二极管压降,然后,电流经由飞轮二极管持续活动。
大多数低压马达驱动电路运用萧特基功率整流器完成飞轮二极管,萧特基整流器具有较低的正向电压和极短的反向恢复时间。这两者在马达驱动运用中都是十分重要的参数因子。
功率MOSFET由反向闸极驱动器驱动。F300的端口引脚默许装备为输入引脚,而且启用弱的100k上拉电阻。在端口被装备而且交叉开关器和周边启用之前,端口引脚一向坚持高电平。当复位接脚坚持低电平时,端口接脚也会被装备为弱上拉启用的输入接脚。透过运用反向驱动器,功率晶体管在预设状况下处于封闭状况。假如运用非反相器驱动,10k下拉电阻应当端口引脚和接地。
为运用3伏特(V)微操控器,闸极驱动器应当具有3V相容的输入电平临界值。假如马达电压在5-15V之间,闸极驱动器能够直接堵截马达电源电压。假如马达电压超越15V,分隔的闸极驱动器电源电压是需求的,一般为5V或许12V。当选用低于10V的闸极驱动器电源电压时,应当运用逻辑电平功率MOSFET。
软件完成十分简略。main()函数初始化频率、端口和周边,然后进入while(1)回路。在while(1)中运用avgADC()函数读取电位器电压值,然后输出这个值到8位PWM。
PORT_Init()函数装备端口输入/输出(I/O)、周边、?用数位交叉开关器。在这儿,为8位PWM?用端口引脚,为闸极驱动器?用推挽式输出引脚。
体系频率SYSCLK被装备运转在24.5MHz最大速率,这答应8位PWM可装备为160奈秒(ns)频率周期和24kHz频率。
ADC0_Init()函数装备ADC为查询形式。ADC增益设定为1,而且为ADC频率挑选1MHz保存频率。重要的是,这儿也要初始化电压参阅,装备ADC运用VDD满量程。
函数readADC()选用查询形式读取电压值一次,并回来ADC值。函数avgADC()调用readADC()函数,而且回来六十四个采样值的均匀值。均匀化ADC读数能够最小化噪声影响,削减PWM输出颤动。
当运用PCA 8位PWM形式时,在CEX0输出0x00值对应到100%的作业周期比;输出0xFF值对应到0.39%的作业周期比,0%的作业周期比能够透过铲除PCA0CPM0 SFR中的ECOM0位来完成。
当运用反向驱动器时,这种联系是相反的。在MOSFET闸极驱动器上,0x00值对应到0%的作业周期比,0xFF值对应到99.6%的作业周期比为了简略起见,本文中所有运用8位PWM的软件典范都仅限于运用99.6%PWM。
在一些情况下,100%的作业周期比是可取的,100%作业周期比将有用的消除开关损耗。因为MOSFET从不会封闭,因而在MOSFET上没有开关损耗,在二极管上也没有丢失,仅有的功率损耗是功率MOSFET中的传导损耗。假如马达估计在大部分时间里都处于全速运作,100%的最大作业周期比是合理的。100%的作业周期比,能够经由铲除PCA0CPM0 SFR中的ECOM0位来完成。






