


摘要:完结无人直升机对移动方针的盯梢是一个较难的技能,针对这个问题,本文依据核算机视觉对无人直升机移动方针盯梢技能进行了研讨。首要,规划了无人直升机盯梢移动方针的总体计划;其次,提出了一种快速辨认定位移动方针的图画处理算法,该算法运用了RGB三通道色彩别离和形状匹配原理而且实时性好;终究,将核算机视觉使用到无人直升机对移动方针盯梢上,并经过试验验证了其可行性,成果标明机载视觉技能能够很好地处理于无人直升机对移动方针的盯梢问题。
近年来跟着无人直升机操控技能不断开展以及使用场合不断扩大,完结无人直升机在移动方针上的自主下降已成为无人直升机开展的趋势,这将大大进步无人直升机履行多种使命的才能,而完结该技能的关键在于对移动渠道的盯梢。在文献和中现已对其进行了研讨,但大都停留在仿真验证阶段,还未在工程上完结。因而,本文把完结小型无人直升机移动方针辨认与盯梢技能作为研讨要点。
完结无人直升机对移动方针的盯梢,其要点在于自动获取方针精确的导航信息。当时用于无人机导航技能首要有惯性导航(INS),全球定位体系导航(GPS)、差分全球定位体系导航(DGPS)以及INS/GPS组合导航等,可是这些技能都不适用于这种场合。因而,本文将核算机视觉使用到无人直升机移动方针辨认定位与盯梢技能上。相对于其他引导办法,核算机视觉能够自动地取得视界内方针的相对运动信息,供给精确的方位信息,而且不依托其它外部信息。
文中给出了依据机器视觉的无人直升机移动方针辨认定位与盯梢计划规划,针对当时核算机视觉盯梢运动物体存在的问题,提出了一种快速捕捉运动方针的图画处理算法,而且给出了具体完结进程,规划了小型无人直升机盯梢移动方针的操控结构,终究进行实践飞翔试验。试验成果验证了计划的可行性,标明核算机视觉能够很好地满意无人直升机对移动方针的盯梢。
1 计划规划
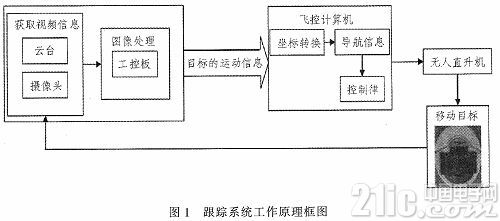
图1给出了依据核算机视觉的无人直升机盯梢移动方针体系的作业原理框图,该体系首要由两部分使命构成,一是核算机视觉对移动方针的辨认定位,二是操控无人直升机盯梢方针。首要,经过图画对摄像头获取的视频信号进行处理,到达辨认方针的意图并得到移动方针的运动信息。然后,把方针的运动信息传给无人直升机飞控核算机,经过飞翔操控律解算后引导无人直升机盯梢移动方针。
2 方针辨认和定位
方针辨认和定位选用核算机视觉的办法,具体是从图画信号中自动辨认方针、提取和取得方针方位信息,其完结首要包括图画获取、图画辨认、方针定位3个部分。由于方针移动,就需要动态捕捉和盯梢移动方针,大大增加了技能完结的困难。一般盯梢动态方针的算法,如CAMSHIFT算法和依据粒子群优化的盯梢算法等,存在简单丢掉方针或许处理时刻较长实时性差的问题。文中提出了一种依据色彩和形状特征的快速辨认动态方针算法,首要规划了方针特征图画,然后给出了具体的完结进程。
2.1 方针特征图画
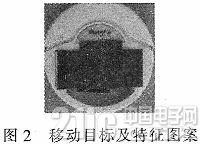
本文规划的方针特征图画从色彩和形状两方面考虑,图2给出了移动方针以及特征图画,特征图画是赤色的凸型。色彩特征是常常用于方针盯梢且作用较好的视觉特征,挑选赤色有利于视觉快速的捕捉,把方针从布景中别离出来。凸型形状既能够用刁难方针的辨认,又可经过处理得到移动方针的运动信息。
2.2 图画处理算法
核算机视觉的处理进程是先对移动方针进行辨认,再获取方针的运动信息。文中的图画处理算法使用丌源的图画处理库函数OPENCV完结,依据提出的算法完结对特定色彩进
行快速捕捉,对特征图画进行匹配辨认,终究得到移动方针的运动信息,图画处理软件流程图如图3所示。
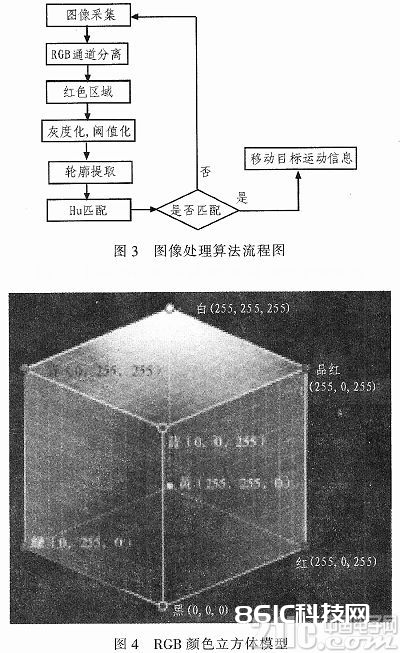
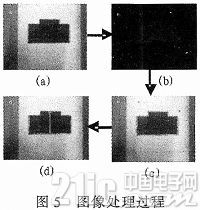
快速捕捉方针首要使用特征图画的色彩信息,一般摄像头收集到的图画都是RGB格局的图画,也便是每一个像素都由红(R),绿(G),篮(B)3个成分组成,图画中每一个像素的RGB重量分配一个0~255范围内的强度值,它们依照不同的份额混合出现16777216(256x256x256)种色彩,色彩立方体模型如图4所示。
快速捕捉方针的图画处理算法首要经过对收集的图画信息依照RGB三通道进行色彩别离,别离得到赤色R,绿色G,蓝色B单通道图画。然后用赤色R单通道图画值减去绿色G单通道图画值和蓝色B单通道图画值,再把绿色G单通道图画值和蓝色B单通道图画值赋0,终究把R,C,B三个单通道图画组合成一副新的三通道图画,图画中只要原来是赤色的区域仍是赤色,其他都为黑色。图5(a)给出了摄像头收集的原始图片,图5(b)给出了处理后的图片,能够清楚地看到别离出的凸型赤色区域。
对新图经过灰度化,阈值化处理,提取出凸型赤色区域的概括,如图5(c)所示,终究经过Hu矩匹配,判别是否为方针的特征图画。如果是方针特征图画,经过概括上每个点在视界中的坐标核算出概括的形心坐标,即方针在视界中的坐标方位,依据图标的几许方位联系,就能够得到凸型标志的
方向,即移动方针的运动方向,如图5(d)所示。
文中提到了概括Hu矩匹配的办法,它对包括缩放、旋转和镜像映射在内的改变具有不变性,能够进步匹配的功率,不会由于直升机高度改变或姿势改变影响对方针的辨认。
3 无人直升机操控结构
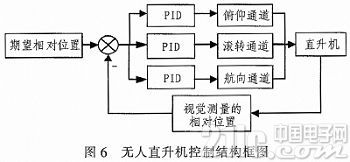
在无人直升机盯梢移动方针进程中,咱们希望移动方针一向处在摄像头视界的正中间方位。具体操控进程是,当无人直升机接收到视觉给出的方针在摄像头视界方位坐标后,飞控核算机依据摄像头成像原理,即小孔成像原理,以及摄像头间隔方针的实践高度,核算出方针与摄像头中心水平方向XY轴的实践间隔,即实践的相对坐标方位,然后转换为机体坐标系下坐标,与希望的相对方位坐标构成反应,经过操控律解算出舵机输出量,操控无人直升机不断调整以减小方位差错,然后终究完结无人直升机盯梢移动方针。别的,依据方针运动方向能够预估方针的运动趋势,调整无人直升机的飞翔方向,图6给出了直升机操控框图。
4 试验成果及剖析
针对提出的依据核算机视觉引导无人直升机盯梢移动方针技能,本文进行了实践飞翔验证。试验中选用TREX600模型直升机,移动方针如图2所示。
试验时,摄像头安装在一个两轴云台上,一向保持其朝下拍照,不受无人直升机的姿势影响。摄像头视界坐标系的中心(视界坐标系原点)与机体坐标系原点重合,视界坐标系的XY轴视与机体XY轴重合。视觉传感器选用100度广角的USB摄像头,焦距3.6 mm。视处理器选用2.5寸工业主板,型号为21268HW,CPU:Intel Cedar view—M N26001.6 G,其处理速度快,能够到达视觉处理的要求。以上设备都归于机载设备,一切的视觉导航信息处理都在无人直升机上完结,彻底完结无人直升机的自主飞翔。
首要验证视觉引导给出的方位信息,对核算得到的相对方位坐标与实践丈量的相对方位坐标进行比照,试验成果如表1所示,只包括部分数据。
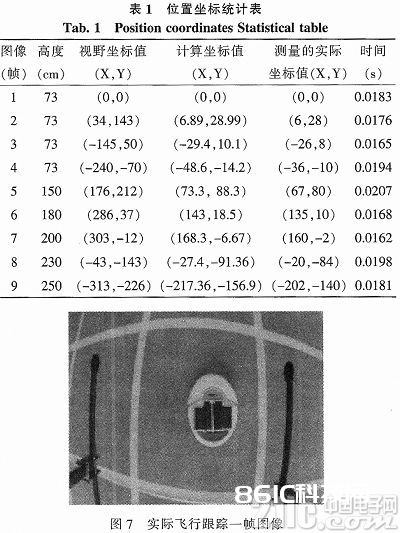
由表1可知,核算机视觉得到的方位坐标与实践的方位坐标存在差错,可是差错很小,能够满意无人直升机盯梢移动方针,而且每一帧图画处理的速度在0.015~0.020 s,辨认成功率高于95%,与其他的运动方针盯梢图画处理算法比较有很大优势。图7给出了实践飞翔时无人直升机盯梢移动方针的图画,方针辨认定位的作用很好,速度很快,而且能够供给精确的移动方针运动信息,彻底到达预期方针,满意了无人直升机盯梢移动方针对方位信息的要求。
实践飞翔中,移动方针只要水平方向上的两自由度运动,速度大约为0.4 m/s,而且无人直升机由GPS引导到移动机器人邻近,无人直升机飞翔速度不超越1 m/s。
图8给出了实践飞翔相对差错曲线,即希望的相对方位坐标与视觉取得相对方位坐标的差错,经过图能够清楚地看出,体系的动态呼应很快,呼应时刻大约为5~10 s,安稳后有稳态差错,但不会发散。试验得到的曲线有些动摇,但实践盯梢作用非常好,动摇或许是由于方针移动,它们之间一向存在间隔差错,不能彻底消除。试验标明依据机器视觉视觉引导的小型无人直升机盯梢移动方针能够很好的完结,验证了其工程完结的可行性。

5 定论
文中完结了无人直升机对移动方针的盯梢,从全体计划规划到具体完结给出了较为具体的进程。从试验成果能够看出,依据核算机视觉引导的办法能够很好地使用到小型无人直升机移动方针盯梢,而且充沛验证了整个体系的可行性和鲁棒性。文中提出的依据视觉引导办法对小型无人直升机移动方针盯梢的完结供给了一种有用的处理计划,而且为下一步完结无人直升机移动渠道下降打下根底。






