


博世力士乐在他的伺服驱动器IndraDrive上扩展了轨道运动操控功用模块 “SMC for IndraDrive”。这意味着,现在博世力士乐的多轴体系在编程与调试环节所需求的时刻大大减少了。作为一种可选的PLC编程办法,力士乐解决计划SMC使得轴耦合,轴同步和次序化运动序列的完成速度更快。这套操控计划特别合适金属成型和拼装操作等最多六轴的运用,支撑机械工程的模块化。通过认证的Safe MoTIon安全功用被集成在InfraDrive伺服驱动器,满意了电流安全规范,降低了机器宕机次数以及随之带来的手动操作介入。


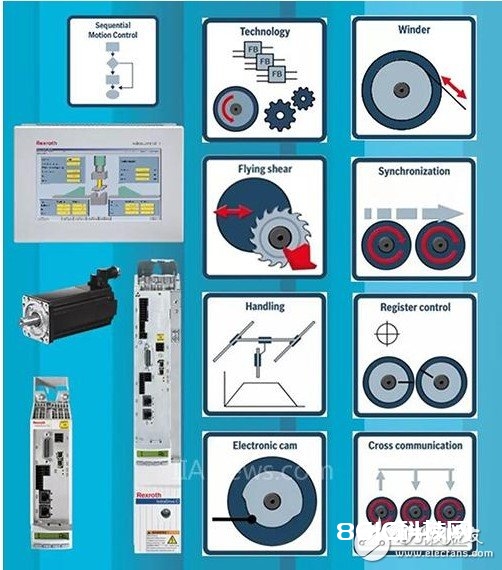
SMC功用模块能够运用在以下的IndraDrive驱动系列:从最小功率 100W的紧凑型驱动器IndraDrive Cs,由功率与逆变模块构成的IndraDrive M,一直到最大功率4MW的IndraDrive ML。它集成了一系列广泛的功用,包含跳动和运动指令,数学核算,预界说指令,运用在供料体系,高速旋转加工以及轴耦合。在IEC 61131-3编译环境下,力士乐也为运用个人电脑的用户独自供给了免费的编辑器。用户能够运用它来对程序进行修正,读取,调试,发动和存档。这个东西乃至能够对活动程序进行调试。相似输入帮手和在线协助文档的交心功用愈加表现了用户友爱的操作。

SMC次序化编程供给了以下几种形式:树立和参阅轴用的手动形式,履行程序的主动形式,以及参数形式。通过Sercos穿插通讯办法,主驱动器能够实时同步最多5根轴。多使命环境能够在主动形式下并行操控最多四个使命。而且,在一个循环使命中的任何时刻,都能够检查状况和确诊。用户能够在运行时监控和调整参数。咱们的解决计划支撑Sercos和多功用以太网体系,例如Powerlink , EtherCAT以及工业4.0环境下的规范以太网,使得驱动器能够衔接更上位的操控体系。
运用根据Open Core Interface 的软件开发包,能够很便利的编写Windows, Android,iOS 的APP。一起咱们也供给软件库,让用户运用C# 和 Java言语开发Windows 和Linux操作体系的HMI。简略的参数化操作使得封装工艺中单件出产过程变得更快。一起这项技能能够运用根据Python的大数据运用,直接评价出产数据和操控伺服驱动器。采用了SMC的伺服驱动解决计划供给了多达175个输入和120个输出。通过认证的Safe MoTIon安全功用不需求操控器的指令循环,就能够十分迅速地对过错进行反响。这项技能通过把设备出产商的想象模块化,大大减少了他们的工程量。






