


摘要:本体系拟计划选用DSP操控步进电机推进轻设备移动完结丈量设备的精准定位。体系拟选用的主操控器为DSP28335,被控目标为最小步进角为1.8°的42步进电机,选用DSP输出PWM脉冲波经过电机驱动器摔制电机的运转。体系根据详细操控要求改动对PWM参数的设置,并经过相关的算法对进程参数进行批改以完结体系意图。电机操控体系的操控精度为线位移10 μm,可以到达为试验室项目进行支撑的意图,本体系亦可广泛使用于电机操控范畴。
关键词:DSP28335操控;PWM脉冲波形;步进电机;A3977SED
0 导言
步进电机是将电脉冲信号转变为角位移或线位移的开环操控器材。在非超载的情况下,电机的转速、中止的方位只取决于脉冲信号的频率和脉冲数,而不受负载改动的影响,它的旋转是以固定的视点一步一步运转的,可以经过操控脉冲个数来操控角位移量,然后到达准确认位的意图。为完结对步进电机的操控,一般可选用单片机为操控器,经过一些大规模集成电路来操控其脉冲输出频率和脉冲输出数以完结步进电机的操控,可是整个体系的准确性、可靠性都存在缺点。本体系是为试验室某项目服务的子体系,体系的研讨意图在于准确、快速、稳定地调理试验设备的相对移动,找到最佳方位、视点安放设备,故本体系拟选用浮点型DSP28335作为体系操控器,拟选用其集成的PWM输出模块,削减外围电路的运用,进步了体系的可靠性和体系的操控精度。
1 体系整体计划规划
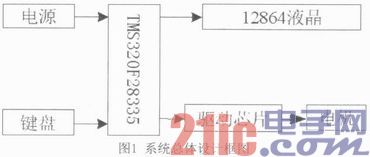
本体系整体规划框图如图1所示。拟选用数字信号处理芯片DSP28335根据操控算法输出一个特定的PWM脉冲序列,该脉冲序列经由特定的步进电机驱动器完结对高精度的42步进电机的操控,经过操控算法主动或许手动调理电机的运转状况和运转速度并送液晶实时显现。经过对体系点位的检测来断定是否到达体系的操控意图,终究经过必定算法完结体系设备方位的选定。
2 体系硬件完结
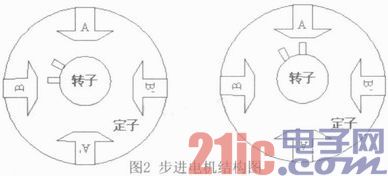
本体系拟选用的主操控器为TMS320F28335,其具有150MHz的高速处理才能,12位16通道ADC,具有32位浮点处理单元,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM)。本体系中正是运用了其独立的PWM模块发生脉冲信号。因课题需求准确认位故选用操控精度为1.8°的42步进电机完结设备推进,步进电机是将电脉冲信号转变为角位移或线位移的开环操控元步进电机件,其结构图如图2所示。
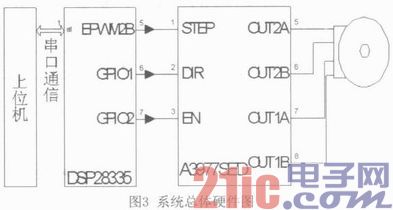
从理论上讲,步进电机的驱动办法只需经过循环改动定子线圈励磁就能完结,可是因为电机对电路驱动才能要求高,故本体系选用外接驱动芯片A3977,A3977细分驱动器选用高性能的专用微步距电脑操控芯片,其含内置转换器的完好的微步电动机驱动器。只需在一个步进输入一个脉冲即可驱动电动机进行一个步进,经过两个逻辑输入确认所在的全、半、1/4或1/8步进形式。其内部同步整流操控电路用来改进脉宽调制(PWM)操作时的功率耗费,而且该芯片可以主动地操控其PWM操作作业在快、慢及混合衰减形式。本驱动芯片设置为全步形式,其选用共阴接法en使能,dir操控方向,step信号接纳脉冲信号,信号的频率决议转速,脉冲的个数操控电机的步进间隔。体系的整体硬件图如图3所示,上位机对信号收集后通讯DSP,使DSP发生相应的操控信号输给连接好42电机的步进电机驱动器A3977SED,操控电机的运转完结体系操控意图。
3 体系软件规划
本体系的软件规划拟从两方面打开:1 PWM脉冲的发生规划,2步进电机的操控办法规划。
3.1 PWM脉冲序列的发生
PWM是使用微处理器的数字输出来对模仿电路进行操控的一种十分有用的技能,广泛使用在从丈量、通讯到功率操控与改换的许多范畴中。本体系选用DSP发生脉冲序列,DSP28335共12路16位的ePWM,能进行频率和占空比操控。PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数形式决议。初始化程序选用的计数形式为递加计数形式。在递加计数形式下,时基计数器从零开端添加,直到到达周期寄存器值(TBPDR),然后时基计数器复位到零,再次开端添加。
PWM信号周期与频率的核算如下:
ePWM的时钟
TBCLK=SYSCLKOUT/(HSPCLKDIV×
CLKDIV): (1)
Tpwm=(TBPRD+1)*Ttbclk: (2)
Fpwm=1/(Tpwm) (3)
其初设置程序流程图如图4所示。

3.2 步进电机的操控
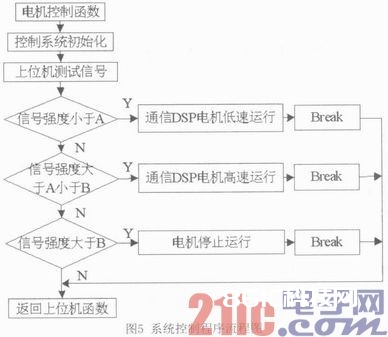
本体系规划了手动和主动两种操控办法,手动形式首要运用于对主动化和操控要求不高的场合,经过按键完结电机的步移、加减速、正回转和启停。主动形式运用于对主动化程度、操控精度要求高的工况。针对试验室项目,本体系选用的操控办法首要为主动形式。上位机上电后即开端检测试验室设备(流量传感器)输出信号,经过与事前设定好的两个阈值A和B(B>A)进行比较,当信号强度为零时电机推进传感器高速循环扫描现场直到信号强度大于阈值A时,体系判别为粗调成功。尔后体系进入微调阶段,电机进入低速运转形式,传感器低速移动直到信号强度大于或许等于B强度时体系操控电机中止运转。体系的操控流程图如图5所示。在本体系中针对不同的工况规划的两个信号阈值为程序规划中的周期寄存器供给了设置根据,因试验室体系对精度要求较高,故周期寄存器设置的初值都较大然后使Fpwm的值较小,电机的转速也相应较低。在本体系中选用EPWM2B端口输出PWM的脉冲,GPIO1操控电机滚动方向,GPIO2操控电机的启停。
4 体系调试剖析
4.1 PWM脉冲调制剖析
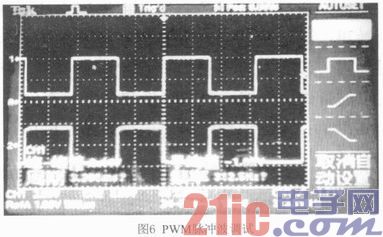
图6为DSP输出的脉冲波形和其相对应的参数,经过修正参数值可以完结对脉冲频率的改动,而且可以经过DSP的点对输出操控电机的运转。经过调试剖析可以很好地完结试验意图,继续地改动电机的运转状况。
4.2 操控精度调试
本体系选用电机推进丝杆移动设备。丝杆选用的是滚珠丝杠,其为一种将回转运动转化为直线运动的抱负的产品。
本体系选用的电机的最小步进角为1.8°故操控精度调试实践便是丝杆精度的调试,本体系选用的丝杆的额外扭矩为4N.m,最小角位移对应线位移为10 μm。
体系整体调试:
现阶段体系调试成果为经过按键和程序操控可以很容易地完结电机的运转,可以经过核算得出电机的运转角速度并送液晶屏显现当时进程量。连接好丝杆的电机可以完结对传感器的推进。经过上位机对传感器信号强度的实时监测,体系可以根本满意规划意图,即体系能主动并有用地进行最佳信号点的检测,到达对物块的准确认位。
5 小结
本体系从实践工程布景动身,旨在为试验室某项目供给技能支撑。经过对体系的规划和调试可以从理论上完结项目意图,到达操控要求。经过硬件选型、软件规划、操控计划研讨和实践调试剖析,体系可以到达预期规划意图。可是本体系还存在一些问题有待处理,因本体系是合作项目其他模块而规划的,而其他模块尚在调试阶段,测试数据不准确,故电机体系操控计划规划模块还有待进步,将在后续项目进程中进一步研讨。本体系当时研讨成果可以适用于对操控精度要求不高的场合,因体系的操控办法比较简单、体系结构简练,有必定的使用价值。






