


本文首要介绍的是关于ldc1000的输出量问题,以及ldc1000的收集值和运用剖析,期望经过本文能让你对ldc1000有更全面的知道。
ldc1000
LDC1000 是世界首款电感到数字转换器。供给低功耗,小封装,低本钱的解决计划。 它的 SPI 接口能够很便利衔接 MCU。LDC1000 只需求外接一个 PCB 线圈或许克己线圈就可 以完结非触摸式电感检测。LDC1000 的电感检测并不是指像 Q 表那样测验线圈的电感量, 而是能够测验外部金属物体和 LDC1000 相连的测验线圈的空间方位联系。
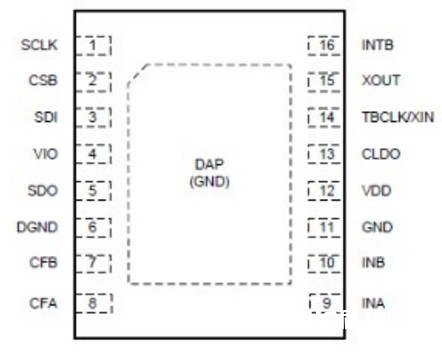
ldc1000引脚图
ldc1000输出量是模仿的吗
在模仿半导体职业具有近 20 年经历的德州仪器 (TI)传感器信号途径产品线司理Jon Baldwin向记者展现了LDC1000的优胜功用,不管低本钱 PCB 线迹或金属,亦或是人体传感,LDC1000都能 敏捷传感并显现准确的成果。现有的传感器,如低本钱的OHMIC开关传感器在尘埃等恶劣环境下不牢靠,FSR压力传感器分辨率有限、不合适遥感、本钱稍 高,高端一些的超成波传感器不合适短间隔传感,电容式传感器活络度高可针对被挑选物的挑选性不高,HALL传感器存在精度问题、需求磁体和校准,光学传感 器在恶劣环境下不牢靠,这些传感器都或多或少存在这样和那样的缺陷,而TI此次推出的电感数字转换器推翻了现有传感器的现状,在分辨率、精度、活络度、灵 活性等方面均优于传统的传感器类型,能给规划师带来更多的规划创意。一起,Jon表明,因为LDC技能的优势显着,十分合适工厂流水线上的运动状况的传感 检测,在工业机器人及智能工厂等工业范畴将发挥杰出效果。
LDC1000收集值的调用程序剖析及运用
LDC1000收集值的调用程序
//将有序数组a[]和b[]合并到c[]中
void MemeryArray(int a[], int n, int b[], int m, int c[])
{
int i, j, k;
i = j = k = 0;
while (i 《 n && j 《 m)
{
if (a[i] 《 b[j])
c[k++] = a[i++];
else
c[k++] = b[j++];
}
while (i 《 n)
c[k++] = a[i++];
while (j 《 m)
c[k++] = b[j++];
}
ldc1000运用
LDC1000是经过调理振动器的起伏一起检测LC的谐振损耗来完结阻抗和谐振频率的丈量。经过检测注入LC谐振单元的能量计算出Rp(等效并联电阻),转换为数字量,其数值和Rp的值成反比。
LDC1000支撑宽规模的LC组合5 kHz到5 MHz谐振频率,Rp的规模支撑798 Ω到3.93 MΩ,此规模即为器材内部ADC的信号规模,确认其分辨率。等效并联电阻Rp与ADC码值成反比,当金属物体离线圈最近的时分涡流最大,损耗也最大。
1 体系构成
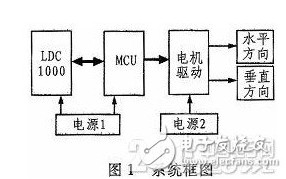
前期金属勘探体系以8位51系列单片机作为操控中心,其硬件电路大体分为2部分,一部分为线圈振荡电路,一般包括:多谐振荡电路、扩大电路和勘探线圈;另一部分为操控电路,包括:霍尔元件、可编程扩大电路、峰值检波电路、模数转换器、单片机、LED显现电路、声响报警电路及电源电路等。因为体系杂乱,准确度常常达不到,而LDC1000评价板中集成了振荡电路、检测电路、模数转换器、寄存器等,运用起来就便利许多,减少了许多不可控的调试环节,体系构成比较简单,测验精度进步。如图1所示。
2 全体规划计划
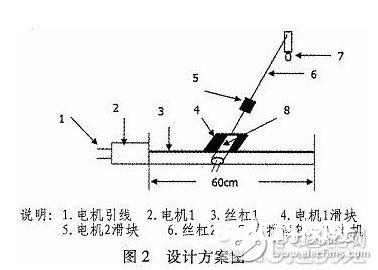
运用LDC1000可将丈量质变换为间隔的特色,可将其放置在一个能够自主移动的设备上,就能够完结必定规模内金属物体的勘探。自主设备需完结主动定位功用,行将LDC1 000所取得的数据进行比照处理后输出,操控自主设备的电机工作,而终究中止在金属物的邻近或上方。本规划全体计划选用TI公司的MSP430微处理器作为操控器与之经过SPI口衔接,经过读取LDC1000的固定寄存器取得相关数据经处理后驱动电机在50 cm*50 cm平面内移动寻迹,如图2所示。
3 硬件构成
3.1 操控器
德州仪器的MSP430系列是一种超低功耗微操控器系列,选用16位的体系结构,16位的CPU集成寄存器和常数发生器,典型运用为传感器体系。MSP430-14系列内置16位定时器,12位A/D转换器,UART、SPI等。本规划中选用MSP430F149,经过SPI口与LDC1000衔接。
3.2 与LDC1000的衔接
LDC1000与MSP430f149的衔接选用四线制SPI衔接方法,经过SPI串行总线完结对LDC1000的操控,完结时序界说和数据读取,在此通讯进程中,LDC1000为从机(Slave)。MSP4 30f149其间引脚p3.0接LDC1000的CSB;P3.1接SDO;P3.2接SDI;P3.3接SCLK。
3.3 移动的完结
处理器输出信号经过H桥驱动电路,完结电机1(X轴)和电机2(Y轴)的操控。依据电机负载,挑选不同的驱动晶体管,本规划中运用8 050和8 550对管完结,选用+12 V直流电驱动。测验中电机工作正常,操控较为活络。经过对规划要求剖析,在规则的时间内完结场内恣意点的查询,挑选减速直流电机(80 r/min)。
为确保整个勘探区域,选用X—Y轴体系完结,电机1驱动滑块完结X轴运动(如图2所示),电机2固定在电机1的滑块上,完结Y轴的运动,再将主操控器固定在滑块2上,LDC-1000传感器则尽量与玻璃平面接近,收集相应数据。显现部分选用LCD12864,能够将相应寄存器数据显现以便调查。当找到金属物体时体系经过指示灯和蜂鸣器报警提示。
4 软件完结
4.1 思路与流程
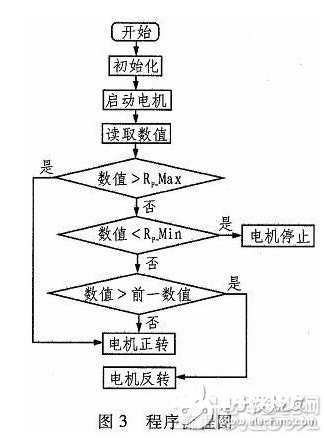
发动后,先对LDC1000中特别寄存器赋值,即设定上限和下限,并留出冗余,然后发动滑块移动传感器,在所经过的当地对对Rp相应寄存器的数据读出并进行数据的比较,去发现数值的改变状况,以此方法来逐次迫临金属物,然后终究中止在金属物邻近或上方。程序履行进程如图3所示。
4.2 程序完结
LDC1000中的寄存器地址已在其头文件LDC1000_cmd.h中界说,编程时将其包括即可。在数据处理中,用户关怀的Rp和Frequency值,Rp可推算出金属的间隔,运用Rp值的改变完结金属物的定位。Rp占用2个寄存器,可经过坚持片选信号有用,进行接连读写,此刻寄存器地址主动添加。
初始化程序:
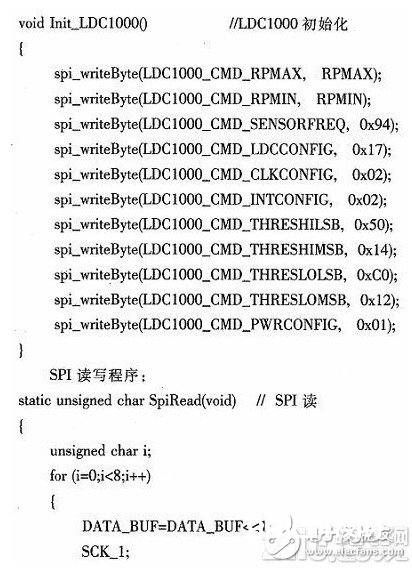
对函数进行调用时,函数参数值的选定应依据LDC1000的SPI通讯协议。在主机与从机通讯时遵从以下过程:片选信号置零;MSP430经过SDI线向LDC1000写入拜访寄存器地
址,其间最高位0表明写入,1表明读出,剩下7位为寄存器的地址。
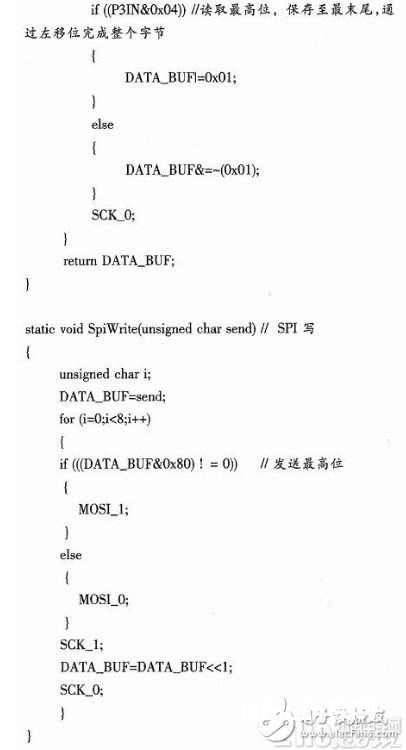
4.3 传感器数据读取
不同的测验目标和间隔会发生不同的损耗,其Rp的规模设置也不同,运用中需求装备寄存器Rp_Min和Rp_Max,假如超出规模会被钳位,但也不能设置为极限值,规模过大,形成内部ADC精度无用。
4.4 完结成果
在测验进程中发现传感器距金属物体的间隔较近时,显现值才会有显着的改变,而大都状况下都归于超出规模而被钳位。而此需求更新程序的算法,还有便是替换克己电感线圈。
LDC1000对滤波电容的要求严苛,稳定性好、压电噪声低,最优值在20 pF~100 nF之间,由LC的谐振时常数决议。电感可选用带磁芯或空心电感,可凭借示波器找到最佳电容值。
结语
关于LDC1000相关介绍就到这儿了,如有不足之处欢迎纠正。






