导言
斗极卫星导航体系是我国自主开展、独立运转的全球卫星导航体系,体系建造方针是建成独当一面、敞开兼容、技能先进、安稳牢靠、掩盖全球的斗极卫星导航体系,促进卫星导航工业链构成,并完善国家卫星导航运用工业支撑、推行和保证体系,推进卫星导航在国民经济社会各行业的广泛运用。
行车记载仪作为车辆办理、调度、安全保证、交通事端断定等方面的有用东西,在欧盟、日本等国家70年代就开端以立法方式在部分客运车辆及货车上强制设备运用。我国自80年代后期开端研制运用轿车行进记载仪,2003年推出引荐性国家标准《轿车行进记载仪》(GB/T190 56)。2014年头中华人民共和国交通运送部发布《路途运送车辆动态监督办理办法》(中华人民共和国交通运送部、中华人民共和国公安部、国家安全出产监督办理总局令2014年第5号),要求公路营运的载客轿车、风险货物运送车辆、半挂牵引车及重型载货轿车(总质量为12吨以上的一般货运车辆)在2015年12月31日前悉数设备、运用卫星定位设备,并接入路途货运车辆公共渠道。跟着斗极卫星导航体系的日益完善,行车记载仪已进入老练、必备运用阶段。
跟着斗极体系空间端和地基增强体系的不断建造,斗极体系在信号捕获、信号盯梢、高精度授时、定位精度、抗干扰力等技能方面先后取得多项重大突破,成为继美国全球卫星定位体系(GPS)和俄罗斯全球卫星导航体系(GLONASS)之后的第三个老练的卫星导航体系。交通运送作为斗极的首要运用范畴,成为军民融合式斗极运用推行的排头兵。
2011年10月交通运送部发动了“要点运送进程监控办理服务演示系列工程”,标志着交通运送范畴斗极运用演示工程正式发动施行,首要运用于要点营运车辆监控办理。该项目触及“两客一危”运送车辆(包含旅行包车、长途班线客车和风险化学品运送车)、应急保证车辆、重载普货车辆等要点营运车辆,经过斗极体系进步运送进程超速、疲惫驾驭、不合法运营等违法违规行为的监控才能,进步办理水平,削减交通事端,进步经济效益,一起验证斗极体系性能指标。行车记载仪便是该工程的详细产品。
1 行车记载仪功用概述
行车记载仪具有下述功用:具有数据记载功用,能够记载行进速度、方位信息、相片、录音、驾驭人身份、路程、设备参数等;具有剖析判别功用,经过屏幕或语音为用户宣布安全警示,如疑点、超时、不合法驾驭、超速、速度状况反常等;感知车辆状况,如车门、供电、车灯、引擎、点火设备、制动等;具有确定、鉴权,以及对驾驭员进行身份认证功用;具有自检功用,能够主动查看卫星定位及通讯模块作业状况、主电状况、卫星定位天线、外设等是否作业正常,并奉告用户自检成果。除此之外,设备能够定位并接纳方位数据,经过串口对设备进行输出和装备,SD、USB进行数据输出、参数批改、固件更新;固件更新、参数批改善程中遇到掉电等意外状况时支撑主动康复功用,保证更新失利时终端能够正常运用。
为便利办理与监控,监控中心能够经过无线网络长途对设备进行参数装备与批改、查询或履行特定操作,并完成设备在监控中心注册和刊出功用、固件更新功用、终端的复位或康复出厂设置等功用。设备的摄影、录音功用保证了行进安全与路途交通事端的断定与剖析更准确无误。
2 硬件架构
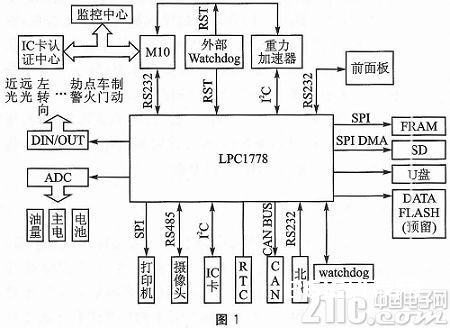
依据上述功用,能够规划出硬件根本架构。因有长途监控和人机界面交互功用,项目选用了移远通讯模块M10,担任长途通讯、MMI人机界面交互、录音以及电话功用;主芯片选用依据ARM Cortex—M3内核的微操控器LPC1788,进行摄影、数据收集与存储以及事情状况判别;斗极芯片选用和芯星通UM220。为支撑掉电、事端等意外状况时设备能够主动康复功用并及时保存实时数据,项目选用了铁电存储器,以加速拜访速度,并保证数据在各种恶劣环境下能够长期保存。原理框图如图1所示。
3 软件关键技能剖析及对策
LPC1788选用单一进程挂载FATFS文件体系的软件架构(无操作体系),收集、剖析、存取各种数据。在实际运用中,会遇到以下问题。
3.1 GNSS定位漂移
当时正式运营的导航体系斗极二号选用无源时刻测距技能进行定位。理论上,用户接纳至少4颗导航卫星宣布的信号,依据信号传输时刻测定用户到这些卫星的距离,依据三球交汇的原理,用户终端自行核算得出其三维坐标与速度。而在实际运用中存在各种因素导致卫星测量差错呈现定位漂移,如星历差错(卫星方位差错)、卫星时钟差错、大气传达推迟批改残差、天线多路径效应差错、高程量取差错、接纳机测距差错及其自身的噪声等。
本项目除运用AGPS获取完好星历(卫星方位、速度)以运用更多卫星改善DOP值(精度因子)外,选用以下组合计划进行改善:
首要,在斗极芯片冷发动定位成功后丢掉前5个点,此刻的点为前次发动芯片最终一次成功定位的点方位,以防止硬件上电初期的不安稳或厂家为缩短定位时刻而采纳快速定位的战略导致定位禁绝,坚持方位信息的延续性。
其次,设置速度最大阀值,若NMEA速度超越该值则直接丢掉该点。例如地上最快的跑车速度也不会超越350 km/h,若超越此值则属漂移直接丢掉该点,或两点距离(每秒取点)超越此值则丢掉后一点。
再次,设置速度最小阀值,若NMEA速度或两点相对速度小于该值则断定设备停止,强制速度为0,方位信息选用前次点数据,然后消除静态漂移。重力加速传感器感知车辆是否运动,与点火器合作运用,可取得车辆停止熄火信息,此刻需设置定位信息为同一点,可在必定条件下防止静态漂移。因车速传感器无法区别拖车状况,不能作为车辆停止标志和消除漂移的参阅条件。
3.2 数据处理
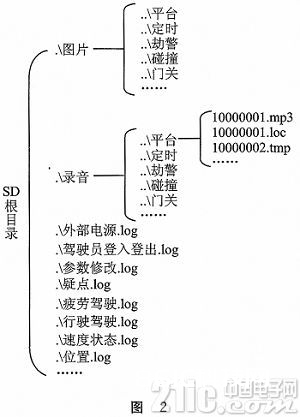
依据硬件特性,LPC1788自带片上NVRAM和EEPROM,另添加铁电存储器,并支撑SD卡和U盘。片上NMVRM用于寄存长途晋级代码,设备初始值和装备参数(车辆信息、状况量装备信息、脉冲系数、初度设备日期、超速阀值等);铁电存储器用于保存暂时变量(多媒体ID、驾驭员登入最终一次时刻、驾证等)、0.2 s距离的速度传感器速度、状况信号、方位信息;SD卡、U盘用于本地固件更新与参数批改,并以文件方式寄存处理过的各种数据。
处理过的数据别离按产生事情的不同存在不同的文件里:外部电源的插拔、驾驭员登入/登出、参数批改、疑点产生、疲惫驾驭、行进速度、方位信息。摄影和录音按不同的事情(守时、定距、劫警、渠道等)也寄存于各自目录下,如图2所示。
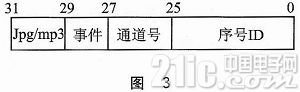
此处特别阐明多媒体数据处理。多媒体数据可本地保存或当即上传监控中心。为保证实时数据完好上传,须树立暂时多媒体文件存于相应目录下,渠道承认接纳完好后主动删去。多媒体文件能够按类型、通道、时刻、事情类型的不同需求检索上传,除时刻可从文件特点中取得,项目对其实施命名规矩(媒体文件名规定为4字节)以辨认其他要素,如图3所示。还需留意,图片数据量与摄影场景杂乱度、压缩率、象素有关,守时、定距摄影距离的设置应加以约束,以防止因数据量过大即进行下一个多媒体文件的操作而形成丢掉数据。
处理过的数据会依据不同的需求写入SD卡中。其间,速度、方位信息需求守时写入,疑点、疲惫驾驭、摄影、速度状况等文件需等事情产生后写入。这存在必定概率的文件写抵触,形成文件乱码或存储方位过错。由所以单线程,在解析、履行操作指令时,也或许因中止呼应形成漏存数据。要处理该问题,可设置寄存收集数据的RAM部分冗余,在其他文件写时,收集到的数据仍可持续存于RAM中,避开写抵触。
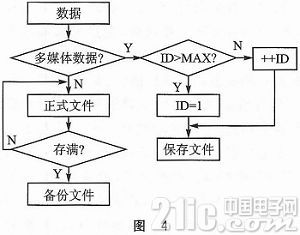
因存储空间有限,保存文件需求自整理。以方位信息文件为例,预留双倍指定容量,一为正式文件,另一为备份文件。当正式文件存满时,将正式文件的内容仿制至备份文件并清空,后续数据持续存入正式文件;若正式文件再次存满,则删去备份文件,再次将正式文件内容备份并清空以做后续数据存储。流程如图4所示。
3. 3 数据传输
从图1中能够看出,M10、斗极和前面板三个串口能够一起向LPC1788发送数据。LPC1788在单线程且内存有限的状况下,会因中止呼应、处理流程等原因丢掉数据,如LPC1788处理相片上传时,M10录音数据需求保存。处理此类问题,能够运用每包双向承认进行牢靠衔接传输,但该进程杂乱、运转功率不高。项目选用面向非衔接协议,直接发包,除设置其间断优先级外,还需添加流量操控,为LPC1788留出处理时刻,增强数据传送牢靠性。
此处设置斗极数据接纳中止为最高优先级,M10其次,前面板最低。M10和LPC1788别离用GPIO模仿RTS(Request to Send)能够接纳数据和CTS(Clear to Send)答应发送数据。M10、LPC1788每次发送数据前,查询本地CTS是否能够发送数据。当M10、LPC1788接纳数据超越阀值时,置位本地RTS,制止对方发送数据;处理安排妥当,即铲除本地RTS答应接纳数据。因M10与LPC1788通讯选用面向非衔接协议,所以存在因误码而丢包的概率。能够经过监控渠道发补包和指令补包,也可自行内部补包,进步上传渠道功率及渠道感触。以多媒体摄影数据实时上传为例,首要摄影存暂时文件,然后分包传送数据,并敞开缓冲发送行列。当遇到CTS为高时,将上传多媒体ID与未上传的分包序号存人行列,退出与M10的数据发送流程,并在主函数中不断轮询CTS。当CTS为低时,相关参数出行列,从头履行与M10的数据传送,在已存储的暂时文件中按分包序号查找开始地址,组包发送数据。
结语
本文剖析了斗极行车记载仪的首要功用和规划思路,以及在研制进程中遇到的一些关键问题,并提出处理计划。现在,该项目产品(见图5)已经过交通运送信息工程质量检测中心检测,进入路途货运车辆公共监管与服务渠道作业终端技能支撑小组检测,以及CCC认证。

这是第一代产品,还有许多待改善、扩展的当地:支撑对CAN协议剖析,进行实时故障诊断,了解车辆车身调平、胎压、空调体系、主动灯开关等状况,并进行长途操作;现在产品选用RSA加密、%&&&&&%卡认证与鉴权以保证信息安全,根绝不合法运用车辆,可做调整以适应于军用、警用等。