摘要:介绍了一种选用STC89C52、L298N和TCRT5000规划的智能循迹和红外遥控的小车。智能循迹选用红外传感器检测路面信息,传递给单片机主动剖析处理,最终操控电机调理小车按预订轨迹平稳跋涉。红外遥控部分是手动形式,单片机解码遥控器宣布的指令,操控电机操作小车。液晶显现模块使操作愈加简略、智能、人性化。实践标明,小车可以精确完结沿黑线轨迹平稳跋涉和接纳遥控器指令。
跟着城镇化,轨迹交通及才智城市的深化推动,关于智能轿车的研讨也就越来越遭到各国政府的注重。全国电子大赛和省内电子大赛简直每次都有智能小车这方面的标题。全国各高校也都很注重该范畴的研讨。智能小车是指可以依照预先设定的形式在必定的环境里主动跋涉。它集中地运用了微操控器、传感器信息处理及主动操控等技能。可广泛运用于科学勘探,工业操控和家用电器等范畴。
1 硬件电路规划
1.1 全体规划
智能小车的全体结构由光敏传感器模块TCRT5000、微处理器模块STC89C52、红外遥控HX1838、输出驱动模块L298N、液晶1602显现模块及串口下载模块构成如图1所示。

智能循迹部分是依据红外反射式光电传感器的寻迹原理,选用STC89C52单片机为中心操控单元,操控步进电机调理小车按预订轨迹平稳跋涉。红外遥控部分是手动形式,单片机解码遥控器宣布的指令,经过步进电机操控小车跋涉路线。
1.2 传感器模块规划
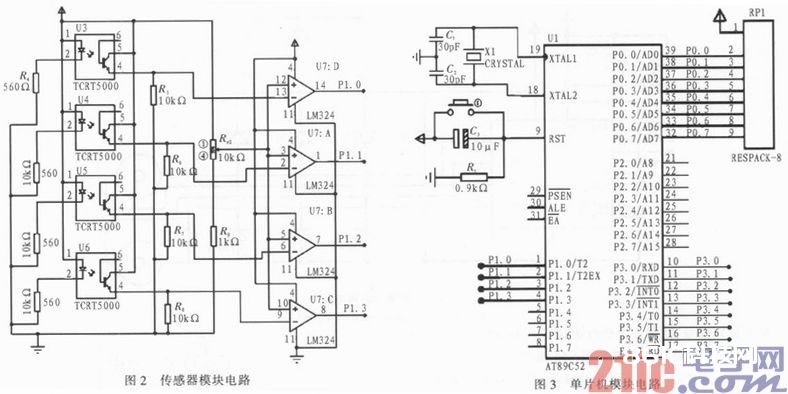
TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或反射回来但强度不够大时,光敏三极管一向处于关断状况,比较器负端相当于接地,比较器输出端为高电平,指示二极管被点亮;被检测物体出现在检测规模内时,红外线反射回来且强度足够大,光敏三极管饱满,比较器负端为高电平,比较器输出端为低电平,指示二极管一向处于平息状况。传感器模块电路如图2所示。
图2中,选用了4个CTRT5000传感器,运放LM423做比较器处理传感器收集到的路面信息,并传递给单片机。可调电阻RV2可以调理比较器的门限电压,使输出波形可以直接够单片机查询运用。
智能小车传感器的布局办法有多种,这儿选用一字型非均匀对称布局。均匀排布型不利于对弯道信息收集的精确性。考虑到弧度信息收集的连接性,非均匀排布选用等角准则,即在直线笔直上方处某点等角的引射线与直线的交点即传感器的分布点,此种办法检测连接简略,程序操控算法简略,使小车操控安稳。
1.3 处理器模块规划
微处理器完结对各个模块的办理,完结对外围模块的信号发送,以及对传感器模块的信号收集,并依据软件算法对所收集的信号进行处理,发送信号给步进电机履行模块进行使命履行,还对各种突发事件进行监控和处理,确保整个体系的正常运作。这儿选用STC89C52。该单片机是兼容8051内核的低电压。STC89C52是一种低功耗、高性能CMOS8位微操控器。具有8k在体系可编程Flash存储器。在单芯片上具有灵敏的8位CPU和在体系可编程Flash使得STC89C52为很多嵌入式操控运用体系供给高灵敏、超有用的解决方案。具有以下规范功用:8k字节Flash 512字节RAM,32位I/O口线,看门狗定时器,内置4KB EEPROM,MAX810复位电路,3个16位定时器/计数器,一个6向量2级中止结构,全双工串行口。ISP(在体系可编程)/IAP(在运用可编程),无需专用编程器,如图3所示。
单片机P3.3引脚担任接纳红外遥控HX1383指令,挑选作业形式(智能循迹形式或手动形式),P1.0~P1.3引脚收集传感器数据,经单片机处理后由P0口输出到液晶屏1602显现。因为P0口内无上拉电阻,需在外面接上拉电阻。P3.4~P3.7引脚传递指令给电机驱动模块,操控小车运转轨迹。
1.4 电机驱动模块规划
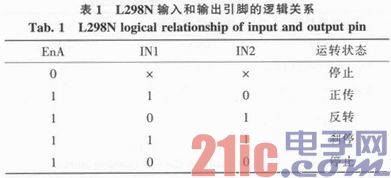
为进步体系功率、下降功耗,功放驱动电路选用依据双极型H桥型脉宽调制办法(PWM)的%&&&&&%L298N。L298N是SGS公司的产品,内部包括二个H桥的高电压大电流桥式驱动器,接纳规范TTL逻辑电平信号,可驱动46伏、2安培以下的电机,作业温度规模从-25度到130度。EnA和EnB是操控使能端,EnA操控OUT1和OUT2之间电机的停转,由EnB操控OUT3和OUT4之间电机的停转,依据IN3、IN4脚的输入电平状况操控OUT3和OUT4之间电机的转向。表1是其使能引脚,输入引脚和输出引脚之间的逻辑关系。
电机驱动模块电路如图4所示。
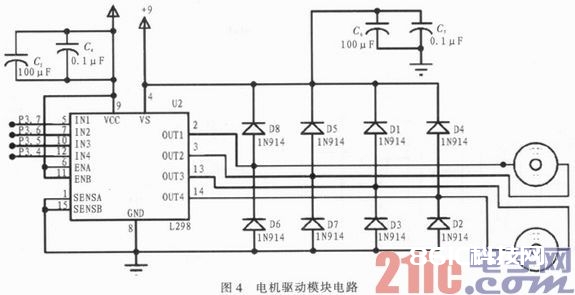
在硬件电路的连接上,单片机的P3.7~P3.4引脚别离接到L298N的IN1~IN4上,经过改动P3.7~P3.4引脚上的凹凸电平以操控小车的跋涉轨迹,经过改动P3.7~P3.4引脚上的凹凸电平占空比以操控电机的转速。EnA和EnB接电源,使使能端有用。为确保L298N驱动芯片正常作业,还要在其与直流电机之间参加四对续流二极管用以将电机中反向电动势发生的电流分流到地或电源正极,避免反向电动势对L298N发生危害。电容C0和C7是滤波电容,削减外界搅扰,使电机安稳作业。C4和C5是电源退耦%&&&&&%。
1.5 显现模块和串口模块规划
显现模块由液晶1602承当,与单片机P0口相连。
串联模块选用芯片MAX232,把PC机程序数据下载到单片机中,完结数据转化。
2 软件规划
2.1 功用及算法剖析
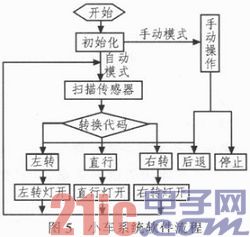
依据液晶屏显现信息,挑选智能循迹形式,仍是手动操作形式。若挑选智能循迹形式,单片机主动处理传感器传送的路面辨认信号,操控小车的行走状况。手动形式由红外遥控器操控。小车体系的软件运用C51编程。
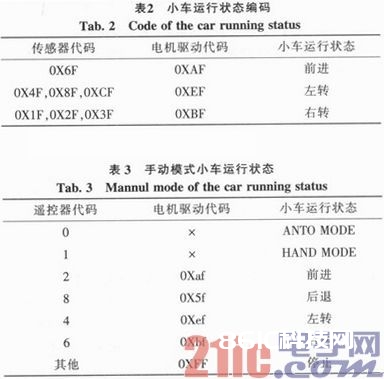
依据传感器的电平信息进行编码,单片机依据编码可将小车运转状况分为3种状况,见表2。操控电机的电平信号由单片机P3口高四位输出到L298N,进行电机驱动操控。
手动形式小车运转状况见表3。
2.2 体系程序规划
体系的程序由延时程序、电机动作操控程序、传感器扫描程序和主程序构成,篇幅约束,需求程序可发邮件。程序流程图如图5所示。
3 结束语
论文选用STC89C52、L298N和TCRT5000完结了智能循迹和红外遥控小车的规划。以红外反射式光电传感器的寻迹原理,选用STC89C52单片机为中心操控单元,操控步进电机调理小车按预订轨迹平稳跋涉。实践标明,该体系抗搅扰能力强,电路结构简略,可以精确完结小车沿给定的黑线快速平稳跋涉和手动遥控操作。显现模块的规划,操作愈加简略、智能、人性化。