摘要:依据图画增强办法,本文提出了一种运用亮度映射的图画去雾快速算法。此算法通过调整室外多雾场景图画的对比度,进步了雾中物体的辨识度。算法的杂乱度低、处理推迟小,实时性高,利于FPGA的完结。完结时不需外存储器,延时为ns级,并供给了强度调理接口,以习惯较广的运用环境。
0 导言
现在关于雾景图画的处理技能已有许多研究成果,但大多数去雾算法要么是依据多幅图画或交融其他信息进行去雾,这大大约束了算法的运用规模。而依据单幅图画的去雾算法,如广泛运用的暗通道办法,大部分仍是运用于PC环境,处理办法杂乱,处理速度慢,需求屡次遍历图画。以暗通道办法为例,文中运用3.0GHz的奔4处理器对600×400分辨率雾景图画进行处理时亦需求10~20秒,难以在嵌入式环境下进行实时处理。
可是以上的去雾算法的处理方针是为了彻底去除图画中的雾气作用以进步肉眼的观感,而在如军事、监控等实时运用中往往无需悉数去除雾气来进步观感,而只是是为了进步感兴趣区域的辨识度,以发现隐藏在雾景中的方针物。所以,怎么进步原始图画中受雾气影响较严峻区域的物体辨识度成为在这些运用场景下进行实时去雾处理的要害点。
本文所选用的快速算法的处理方针便是运用雾景图画的亮度散布特色,通过选用依据图画增强的办法来进步原始图画中被雾气影响的前景象体的辨识度。算法杂乱度低,优化后的FPGA完结能够做到ns级的延时。
1 算法介绍
室外多雾环境因为空气中的雾气改变了大气散射条件,使得收集到的物体图画发生了对比度退化。广泛运用的雾景图画数学模型如式(1)所示。
I(x)=J(x)t(x)+A[1-t(x)] 式(1)
式(1)中:I是观察到的雾景退化图画,J是无雾时的景象图画,A是大气光照,t是透射率。所以要进行彻底的去雾便是要通过I和某些先验条件反算出J、t、A。
本文算法首要重视大气光照参数A对图画所发生的影响,令t=0,可得I=A,可见A指代当场景中没有物体时所观察到的大气光照图画。而因为物体的视觉信息都是由大气光照下由物体反射得到,在反射中物领会吸收部分光线,形成亮度丢失。所以A一般为整幅雾景图画的亮度最高值,所以有如下示意图来进一步表述退化作用的原理。

由式(1)结合图1易见,雾景图画实践可当作由原始无雾图画上按份额半透明地叠加上一层高亮白色图画得到的成果,而其叠加份额参数决定于透射率t,透射率越高,雾气关于成像的影响越小,得到的图画越挨近实在。而在室外场景中,雾气浓度散布均匀情况下,物体间隔相机越远,透射率越低,即收集到的物体图画的退化程度越高。而因为A一般为整幅图画的亮度最高值,所以雾景中物体的亮度也会跟着退化程度的进步而变高。
所以,由理论模型咱们能够得到以下定论:在一般的雾景图画中,物体间隔相机越远,图画的退化程度越高,其亮度也随之变高。即雾景图画的亮度和退化程度具有必定程度的正相关性。
依据以上的剖析,咱们能够通过增强高亮度区域图画的对比度来进步雾景图画中退化较严峻区域物体的辨识度。咱们运用式(2)来进行亮度的映射以完结对高亮度区域的对比度增强。式(2)所对应的亮度映射曲线如图2对比度曲线应具有随亮度进步滑润需求运用如式(2)所示的函数进行对比度调理得到的亮度映射曲线如图2所示。
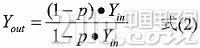
式(2)中参数p为增强强度,取值规模[0,1)。当p=0时Yout=Yin即没有增强。
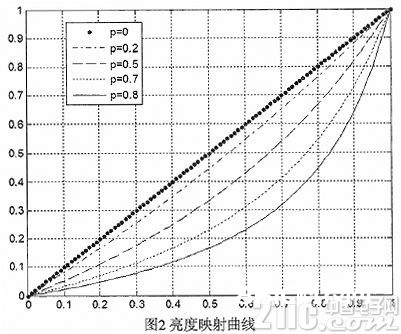
图2中的p=0时的平直线为规范对比度曲线,能够看出当亮度较低时算法的曲线斜率小,跟着亮度变高,斜率逐步变大。而且斜率改变接连,曲线滑润,以下降由对比度调理所带来的图画失真。一起,跟着p增大,曲线的曲度变得剧烈。
2 FPGA完结
依据FPGA的硬件处理,需求将原[0,1)的浮点数对应到[0,255]的定点整数域进行处理。所以此算法对FPGA来说只需树立并保护一个8bit 256的亮度映射表即可,适合在FPGA中完结。
2.1 硬件结构
由FPGA为中心树立的硬件渠道框图如图3所示。模仿标清PAL视频通过AD芯片转换为数字视频输入到FPGA中,在FPGA内对视频进行去雾处理,处理完的数字视频输出到DA芯片中再转换成PAL输出给显现器显现。

数字化后的PAL信号契合BT.656规范,为内嵌同步码的YUV数字视频,其间Y重量为亮度重量,FPGA即针对此重量进行去雾处理。
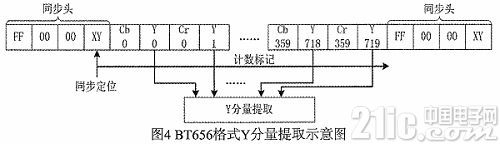
BT656视频格式以及Y重量的提取办法如图4所示。
依据BT.656码流中的内嵌同步头对数据定位,再对定位后的流数据进行计数,计数中如图4所示的第偶数个数据为Y重量,将其提取出运用本算法进行处理。
2.2 算法优化
因为实在场景中收集的图画往往亮度无法到达饱满,假如直接运用式(2),很多像素都映射到低亮度部分曲线,反而压低了整个对比度所以不会得到太好的作用。所以原公式中需求参加最大亮度Ymax参数,将(Ymax,255)作为曲线的收敛点,一起将式(2)的核算处理成定点整数域核算以利于硬件完结,最终得到优化后的公式:

式(3)中的Yin,P,Ymax,Yout有用位数均为8bit,取值规模为[0,255),即变量的归一化值变为255。其间,Ymax为一帧图画像素中的最大亮度。当Ymax=210时,式(3)所得到的亮度曲线如图5所示。
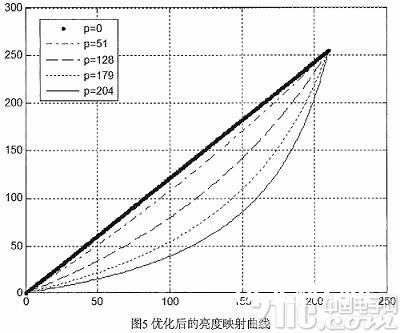
由图5可见,优化后的亮度映射曲线与图2根本共同,但收敛点变为(Ymax,255),然后进步亮度改换的有用性。
因为要计算图画中的亮度最大值,所以需求遍历一遍图画,这样会添加40ms(一帧PAL图画的传输时刻)延时。实践处理时能够运用视频帧间差异较小这一特色,取上一帧的Ymax作为当时帧处理的参数。因为Ymax是上一帧的最大值,所以算法处理时或许呈现当时帧的Yin大于Ymax然后其映射得到的Yout值或许溢出(大于255)。因而,树立和更新映射表时需求将核算成果大于255的值进行钳位,使其等于255,由以上办法得到FPGA逻辑原理框图如图6所示。
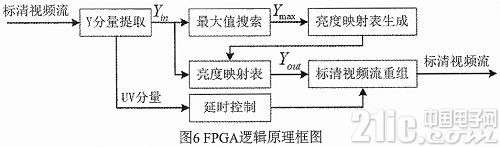
图6中的Y重量提取模块将输入视频流中的Y重量提取出来分支到两路处理,一路进行最大值查找,当一帧结束时得到Ymax输出给亮度映射表生成模块生成新一帧的亮度映射表;分支的另一路查询当时亮度映射表,得到增强后的Yout,最终和UV重量再次复组成标清视频流输出到AD芯片进行PAL编码。
2.3 去雾作用和功能
针对几张雾景样图的处理作用如图7所示。
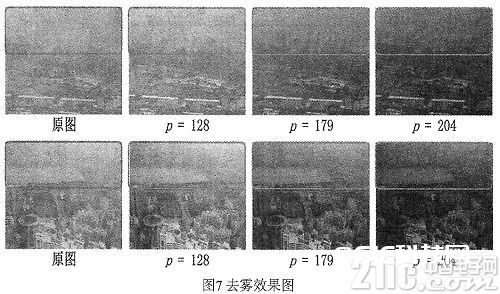
处理的作用由图7能够看出,雾气充满的图画上部区域在增强处理后对比度有所进步,原图区域中的物体含糊一团,跟着增强强度的进步其纹路特征根本可辨认。
但此种进步作用是以下降图画全体亮度为价值的,当参数升高时,全体亮度逐步下降。所以在不同的光照条件下,选取不同的P值能够得到更好的感官作用。
在处理的功能方面,因为在映射表的树立和更新中运用上一帧图画的Ymax,对当时帧处理时,表已在上一帧图画结束后的消隐时刻中更新结束。所以,当Yin输入时直接进行查表得出增强后的Yout,延时仅为一个时钟周期,本文所完结的规划中运用27MHz时钟作为体系时钟,即延时约为37ns。
算法运用Xilinx公司低端系列Spartan3的XC3S400AN完结,仅占用402Slices,3个乘法器以及54Kbit块ram,最高能够运转到142MHz,而且不需任何片外存储资源,所完结体系的成本低,功耗小,实时性高。
3 小结
针对室外多雾环境下,雾中景象亮度高,但对比度低的特色,本文提出了一种运用亮度映射的图画增强算法。依据此算法能够快速树立亮度映射表,对输入图画的亮度运用查表法处理即可完结图画多雾区域的对比度增强,能够有用进步多雾场景中物体的辨识度。在FPGA中完结的逻辑电路杂乱度低,实时性强,资源占用少。