摘要 在电动汽车的研讨傍边,驱动电机及其操控体系规划尤为重要,文中依据英飞凌公司的16位微操控器芯片XC2267,规划了电动汽车用永磁同步电机磁场定向矢量操控体系。对操控体系部分硬件电路进行了规划,并在Simulink仿真环境下树立电机操控体系的的仿真模型。仿真结果表明,体系规划合理、电机运转呼应快、安稳性好,并且对永磁同步电机实践操控体系具有必定的指导意义。
要害词 永磁同步电机;Infineon;矢量操控;Simulink
电机驱动体系是电动汽车的要害部件之一。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)伺服调速功能优越,去除了直流伺服电机的额机械换向器和电刷,使结构愈加简略;且具有质量轻、体积小、功率因数高级长处;被广泛应用于对精度和功能要求较高的范畴。
本文依据磁场定向操控(FOC)原理,规划了以资源丰富和高速呼应为特色的英飞凌16位微操控器XC2000作为主控芯片构建一个高功能的永磁同步电机伺服操控体系。终究,在Simulink环境下构建操控体系模型,验证了操控体系的有效性。
1 体系整体操控规划方案
1.1 FOC原理
永磁同步电机矢量操控是在磁场定向坐标上,将定子电流矢量分解成励磁电流重量和转矩电流重量,完结解耦定子电流的彻底解耦,然后分别对两者进行调理挑选。然后简化PMSM的操控。依据磁势和功率不变准则,将永磁同步电机的三相电压、电流和磁链经过坐标改换由三相ABC停止坐标系下的量改换成d—q旋转坐标系下的量,定子电流矢量被分解为按转子磁场定向的两个彼此正交的电流重量,即定子电流的励磁重量id和转矩重量iq。iq调理参阅量由速度操控器给出,经过电流环调理后输出d—q轴上的电压重量,即ud和uq。将操控量ud和uq经过反Parke改换后,得到α-β坐标系上的重量uα和uβ。依据uα和 uβ值的巨细和SVPWM空间矢量组成办法完结矢量操控的输出,抵达矢量操控的意图。
1.2 三闭环操控体系规划
体系选用电流、转速、方位三闭环操控来完结对电机的转速操控。
其间速度环的效果在于确保电机的实践转速与指令值共同,消除负载转矩扰动等要素对电机转速的影响。速度指令与反应的电机实践转速相比较,其差值经过速度调理器发生相应的电流参阅信号的幅值,再与经过磁极方位检测得到的电流参阅信号相位相乘,既得到完好的电流参阅信号,该信号操控电机加快、减速或匀速,然后使电机的实践转速与指令值保持共同。
电流环由电流操控器和逆变器组成,其效果是使电机绕组电流实时、精确地盯梢电流参阅信号。方位环发生电机的速度指令并使电机精确定位。经过设定的方针方位与电机的实践方位相比较,运用其误差经过方位调理器来发生电机的速度指令,当电机初始发动后,会发生最大速度指令,使电机加快并以最大速度恒速运转,在小误差区域,发生逐次递减的速度指令,使电机减速运转直至终究定位。
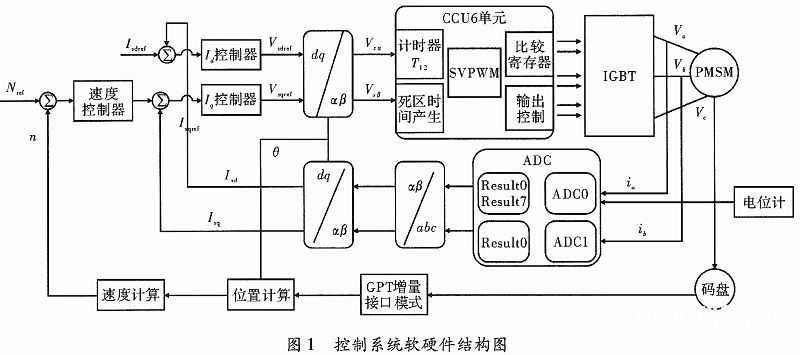
操控体系的内环及外环操控器均为数字操控,都是由XC2267来编程完结。芯片依据给定速度值与经霍尔传感器得到的速度值进行比较运算得到电流给定值,实践为对应的电机给定电压值。伺服体系选用三闭环级联操控形式,首要功能模块包含方位及速度检测、电流采样、PI调理器、SVPWM、坐标改换单元等。规划的伺服操控体系运用CCU6单元比较发生PWM输出信号,通用定时器GPT用于检测转子方位并核算转速,ADC用来采样绕组电流和速度模仿量指令。详细操控体系软硬件结构如图所示。
2 硬件电路的规划
操控体系选用XE164FN系列MCU,三相全桥驱动芯片6ED003L6和OptiMOS功率晶体管,电机为永磁同步电机,方位传感器选用光电编码盘,电流传感器选用LEM公司的霍尔传感器。体系供电由36 V直流电供给。
2.1 PMSM驱动电路规划
PMSM驱动电路运用的驱动芯片是英飞凌的3相桥驱动芯片6ED003L06-F,它集成了三相电平转化、门极驱动和电路维护等许多特性,在缩小芯片尺寸的一起进步了功能,如抗反相瞬态电压的鲁棒性等。
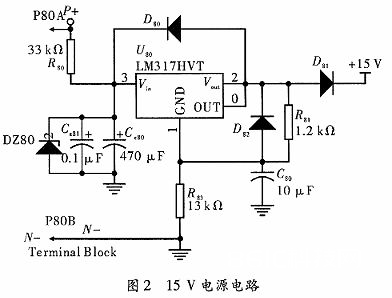
PMSM驱动电路选用DC24~36V外部电源。6ED003L06-F作业电压为15V,霍尔传感器作业电压为5V。15V电源经过降压型DC—DC电压转化器LM317得到,详细结构如图2所示。
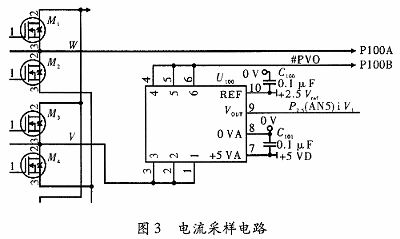
2.2 电流采样电路
选用LEM公司的闭环电流传感器LTSR25-NP,该元件具有超卓的精度、杰出的线性度和最佳的反应时刻。LTSR25-NP的丈量电流为6~25A,丈量规模为±80A,精度为0.7%,作业温度为-40~85 ℃。LTSR25-NP可将电流转化为电压信号,其初级额外采样电流IPN=25 A,在25 A时输出电压为3.125 V,0 A时输出电压为2.5 V,输出电压经过单片机的ADC模块进行采样处理。图为V相电流采样的电路图:
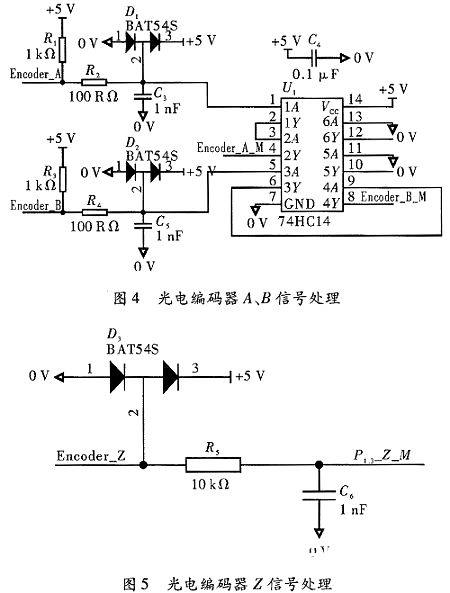
2.3 信号处理电路
该电路经过RC构建低通滤波电路对增量式光学编码器的输出信号进行滤波,一起选用反相器74HC14对信号进行阻隔处理,以进步信号的输入阻抗。光电编码器A、B、Z信号处理电路如图所示。
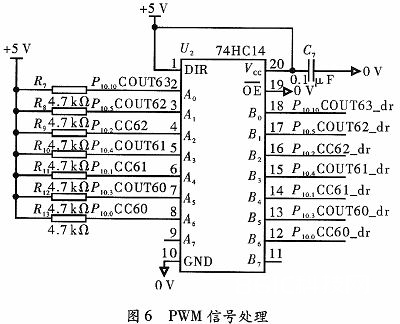
本电路选用总线收发器74HC245来增强PWM信号的驱动才能,以补偿单片机的数据总线端口负载才能缺乏。详细电路结构如图6所示。
3 操控体系软件规划
电机操控体系的软件规划有必要满意实时性、可靠性和易维护性的要求。
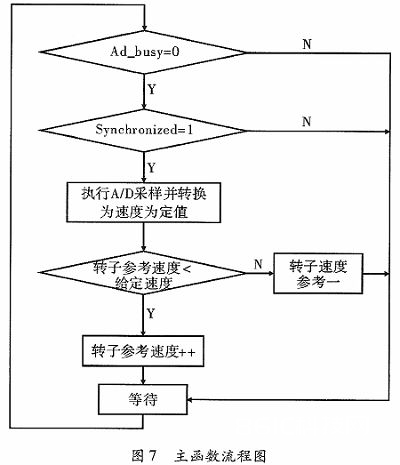
3.1 主函数
和一般操控体系软件相同,主程序规划相对内容较少,大部分是体系的初始化,复位后首要完结main.c文件中的初始化进程,对各个初始化变量进行赋值。完结初始化后,主函数main()不断履行模仿给定速度采样流程,主函数流程图如图7所示。
3.2 CCU6中止函数
在CCU6中止函数中完结的首要程序操控使命包含:
(1)在定时器周期匹配中止中,履行PMSM_FOC()函数完结采样处理以及SVPWM核算,算出SVPWM波形需求的比较时刻,并写入通道映射寄存器。
(2)在定时器CCU6的1-匹配中止中是使能映射寄存器传输,就将比较值写入了各个通道的比较寄存器。
(3)Trpf中止是外部维护中止,出现异常时用来封闭PWM输出口并切换至停机状况,起到维护效果。
3.3 PMSM_FOC()函数
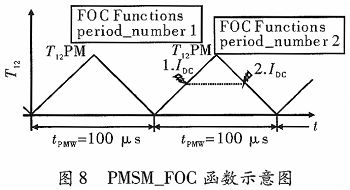
CCU6定时器Timer12每100μs发生一次中止,而PMSM_FOC()函数分红两个阶段。
period_number 1:进行电流采样和方位速度采样,并进行累加计数。计数至给定值count时进行速度环调理,完结Clarke和Parke改换。
period_number 2:履行电流环的PI调理和SVPWM空间矢量生成。
4 操控体系建模仿真剖析
在Simulink环境下树立了PMSM操控体系的仿真模型,并设定相关参数:额外转速n=3 000 r/min,额外转矩M=4 N·m,极对数p=4,转动惯量J=0.008 kg·m2,定子绕组电阻R=2.875 Ω,母线直流电压Udc=310 V。
为验证所规划的PMSM操控体系仿真模型静、动态功能,体系空载发动,给定的初始速度为500 r/min,在t=0.05 s时给定速度升为2 000 r/min。并在t=0.1 s时突加负载TL=10 N·m,在0.3 s的仿真时刻中的到体系的转速、转矩和A相电流仿真曲线如图9-图11所示。
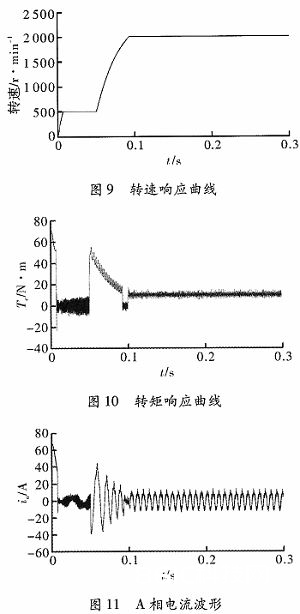
由图能够看出体系在电机通电今后,敏捷抵达最大转矩,然后快速回到安稳值,在0.05 s时给定速度上升到2 000 r/min,转矩稍有动摇后趋近平稳,在0.1 s时负载转矩突变为10 N·m,输出转矩波形随之给定,完结对电机瞬时力矩的操控如图10所示;转速以直线上升,敏捷抵达给定值500 r/min,在0.05 s时给定值变为2 000 r/min,转速平稳上升至给定值,在0.1 s负载转矩发生改变时,转速稍有动摇如图9所示;定子A相电流的改变如图11所示。由此能够看出,此操控体系呼应快,抗干扰功能好,仿真波形与理论剖析隋况共同,说明晰所建模型的正确性和操控战略的有效性。
5 结束语
本文运用英飞凌芯片XC2267完结了对永磁同步电机速度操控体系的规划。规划了体系的各部分硬件电路,包含驱动电路、电流采样电路和信号处理电路等;在操控战略上运用了磁场定向操控;在Simulink环境下进行操控体系的建模仿真,试验结果表明此模型呼应快速平稳。