现在,以磁悬浮体系为主的制作业开展较为缓慢,其关键是产品的规划办法有待进步。而作为磁悬浮根底的单自由度操控战略与办法则能够视为多自由度体系操控的根底,因此具有很高的研讨含义。
磁悬浮平衡板作为完成单自由度操控体系的典型模型,在原理性的试验渠道得到运用。因为其模型精度较低,所以可将空间的操控模型转化为平面的单自由度研讨。一般操控体系的结构均以位移传感器、PID调理器(模仿或数字)以及功率扩大器(模仿或开关)组成。其间,功率扩大器供给体系输出负载电流,以到达恰当改动电磁铁(磁轴承)的电磁力,使得平衡板能够得以安稳悬浮。
功率器材OPA544具有呼应速度快、线性度好、失真小等特色。本文选用OPA544器材,通过对单自由度平衡板操控体系功率扩大器电路进行试验测验,完成其单自由度的悬浮操控。对扩大器的要求是线性度好、扩大后信号的失真程度应≤10%以及散热条件需满意体系的要求。通过仿真模仿以及平衡板悬浮试验,证明器材OPA544能够完成单自由度的磁悬浮操控体系的功率扩大效果。为简化试验中的操控进程,在功放前的信号调度运用了模仿PID操控。
1 渠道悬浮体系模型
1.1 平衡板悬浮体系的数学模型
图1所示为本文试验所用的平衡板悬浮体系模型的外形图。平衡板由其质量中心支点支承,并到达消除整个平衡板重力在操控中的影响。在平衡板的左右两边,对称安顿电磁铁,其上绕组以四线平行绕制(4×120 匝/组),平衡板与电磁铁上平面之间设有气隙。通过对两边电磁铁输出电流的操控改变,使其对平衡板施加的电磁力得到调整,完成平衡板在绕组中心支点的摇摆且到达和力矩为零,使得平衡板在两边电磁铁有用作业气隙间完成安稳悬浮。
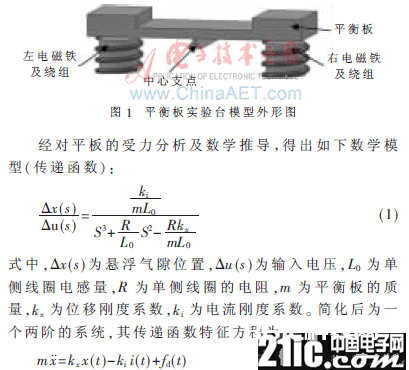
平衡板试验台的相关参数:偏磁电流为1 A,平衡气隙为1.17 mm,磁极的截面积为800 mm2,电磁线圈的匝数为4×120匝,求得平衡板的转动惯量为0.232 kg·m2,设置前级PID操控体系与后级功率扩大器的最小截止频率为5 kHz。电涡流传感器的静态标定的灵敏度为8 000 V/m,其线性作业规模为-2 V~-12 V。经丈量,可知渠道体系中的干扰力fd在体系中暂不考虑;对应的位移刚度系数kx=3 615 N/m,电流刚度系数ki=4 230 A/m[2]。
1.2 操控器的规划
由上述剖析取得体系在微分操控与积分操控并联,而份额增益操控串联时的PID调理闭环操控电路框图如图2所示。其相关参数为:积分时间常数规模Ti=2.5 ms~25 s,微分环节惯性常数ε=0.02,电路的最大超前角Φc=74°。由此可完成微分操控,使得体系呼应速度快,微分时间常数为Td=0.544 2 ms。
2 功率扩大电路仿真与试验成果
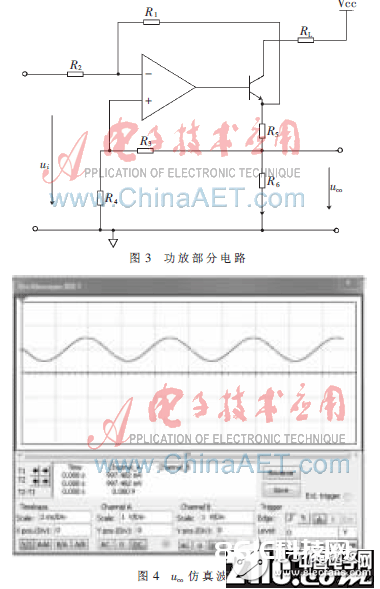
仿真试验以实践单自由度功率扩大电路为模型,试验中运用两个OPA544器材,通过差动式操控方法,并选用双极性晶体管,以保证功放及负载(支承电磁铁线圈)中的电流无逆流现象[3]。闭环仿真模块的功放部分电路如图3所示,电阻R2接入PID操控电路的输出,支承电磁铁线圈中预置偏磁电流I0=1 A。设负载电阻RL=3 ?赘,通过NI仿真后得到uco波形如图4 所示[3]。仿真成果表明,本规划根本正确,电路可满意平衡板的试验要求。