


工业运动操控包含一系列使用,包含根据逆变器的电扇或泵操控、具有更为杂乱的沟通驱动操控的工厂自动化以及高档自动化使用(如具有高档伺服操控的机器人)。这些体系需求检测多个变量,例如电机绕组电流或电压、直流链路电流或电压、转子方位和速度。变量的挑选和所需的丈量精度取决于终端使用需求、体系架构、方针体系本钱或体系杂乱度。还有其他考虑要素,例如状况监控等增值特性。据报道,电机占全球总能耗的40%,世界法规越来越重视整体工业运动使用的体系功率(参见图1)。
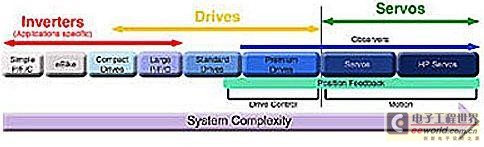
图1:工业驱动使用图谱
各种电机操控信号链拓扑中的电流和电压检测技能会因电机额定功率、体系功用要求和终端使用而有所差异。因为这个原因,不同的传感器挑选、电流阻隔要求、模数转换器挑选、体系集成度和体系电源/接地区分,导致电机操控信号链完成计划也不相同。尽管阻隔要求一般对终究电路拓扑和架构有着重要影响,但本文重视的重点是怎么改进电流检测(作为一个影响要素)来完成更高效的电机操控体系。
电流和电压丈量
图2所示为一个通用电机操控信号链。为完成高保真丈量而进行的信号调度并非易事。相位电流检测特别困难,因为该节点衔接的电路节点与逆变器模块核心中的栅极驱动器输出的节点相同,因而在阻隔电压和开关瞬变方面的需求也相同。
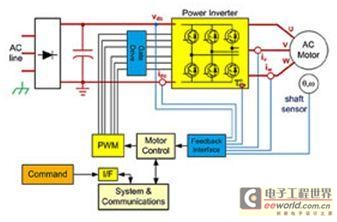
图2:通用电机操控信号链
电机操控中最常用的电流传感器为分流电阻、霍尔效应(HE)传感器以及电流互感器(CT)。尽管分流电阻不具有阻隔功用且会引起损耗,但它是一切传感器中最具线性、本钱最低且一起适用于沟通和直流丈量的传感器。为约束分流电阻功率损耗的信号电平衰减一般将分流使用损耗约束为50 A或更低。电流互感器和霍尔效应传感器可提供固有的阻隔,因而可以用于电流较高的体系,但它们的本钱更高,并且在精度上不及选用分流电阻的解决计划,这是因为此类传感器自身的初始精度较差或许在温度方面的精度较差。与传感器类型不同,电机电流丈量节点有许多挑选,如图3所示,其间以直接同相绕组电流丈量最为抱负,可用于高功用体系。






