


运动操控体系是以电动机为操控目标,以操控器为中心,以电力电子、功率改换设备为履行机构,在操控理论指导下组成的电气传动操控体系。运动操控体系多种多样,但从根本结构上看,一个典型的现代运动操控体系的硬件首要由上位计算机、运动操控器、功率驱动设备、电动机和传感器反应检测设备和被控目标等几部分组成,如图1所示。电动机及其功率驱动设备作为履行器首要为被控目标供给动力,特别规划运用于伺服体系的电机称之为伺服电机,一般内含方位反应设备,如光电编码器。现在首要运用于工业界的伺服电机包含直流伺服电机、永磁沟通伺服电机与感应沟通伺服电机,其间以永磁沟通伺服电机占大多数。
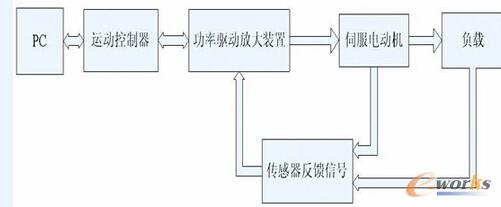

图1 典型运动操控体系组成
运动操控器是以中心逻辑操控单元为中心、以传感器为信号灵敏元件、以电机或动力设备和履行单元为操控目标的一种操控设备。其功用在于供给整个伺服体系的闭路操控,如方位操控、速度操控和转矩操控等。
运动操控器的分类
现在市场上的运动操控器依据不同的办法有不同的分类。
按被控目标分类:
依据运用场合被控目标的不同可分为步进电机运动操控器、伺服电机运动操控器和既可以对步进电机进行操控又可以对沟通伺服电机进行操控的运动操控器。
按结构进行分类:
依据计算机规范总线的运动操控器
依据总线的运动操控器是运用计算机硬件和操作体系,并结合用户开发的运动操控运用程序来完结的,具有高速的数据处理才能。总线方法上首要有isa接口、pci接口、vme接口、rs232接口和usb接口等。这种运动操控器大都选用dsp或微机芯片作为cpu,可完结运动规划、高速实时插补、伺服滤波操控和伺服驱动、外部i/o之间的规范化通用接口功用,一同随操控器还供给功用强壮的运动操控软件库:c言语运动函数库、windows dll动态链接库等,可供用户依据不同的需求,在dos或windows等渠道下自行开发运用软件,组成各种操控体系。
例如美国deltatau公司的pmac多轴运动操控器,选用motorola公司的高功用数字信号处理器dsp5600x作为cpu,可以最多一同操控8根轴,与各品种型的主机、放大器、电机和传感器一同完结各种功用。英国阿沃德公司的trio运动操控卡、固高科技(深圳)有限公司的gt系列运动操控器产品和美国ni公司的ni系列运动操控器等都是这类产品。
从用户运用的视点来看,这些依据pc机的运动操控器之间的差异首要是硬件接口(输入/输出信号的品种、功用)和软件接口(运动操控函数库的功用函数)。
soft型敞开式运动操控器
依据soft型敞开式运动操控器[3>供给给用户很大的灵活性,它的运动操控软件悉数装在计算机中,而硬件部分仅是计算机与伺服驱动和外部i/o之间的规范化通用接口,好像计算机中可以装置各种品牌的声卡、cdrom和相应的驱动程序相同。用户可以在windows渠道和其他操作体系的支撑下,运用敞开的运动操控内核,开发所需的操控功用,构成各品种型的高功用运动操控体系,然后供给给用户更多的挑选和灵活性。
这种操控器的典型产品有美国mdsi公司的open cnc、德国pa(power automation)公司的pa8000nt,美国soft servo公司的依据网络的运动操控器和国内的固高科技有限公司的go系列运动操控器产品等。soft型敞开式运动操控的特点是开发、制作本钱相对较低,可以给予体系集成商和开发商愈加个性化的开发渠道。此类产品的价格国内产品广泛要低于国外产品,但在技能功用上也存在必定距离。
嵌入式结构的运动操控器
这类运动操控器是把计算机嵌入到运动操控器中的一种产品,它可以独立运转。运动操控器与计算机之间的通讯依然是靠计算机总线,实质上是依据总线结构的运动操控器的一种变种。在运用中,选用如工业以太网、rs485、sercos、profibus等现场网络通讯接口联接上级计算机或操控面板。嵌入式的运动操控器也可装备软盘和硬盘驱动器,乃至可以经过internet进行长途确诊,例如美国adept公司的smartcontroller,固高科技公司的gu嵌入式运动操控渠道系列产品等。
运动操控器运用场合的操控方法有:
点位运动操控
即仅对结尾方位有要求,与运动的中心进程即运动轨道无关。相应的运动操控器要求具有快速的定位速度,在运动的加快段和减速段,选用不同的加减速操控战略。在加快运动时,为了使体系可以快速加快到设定速度,往往进步体系增益和加大加快度,在减速的末段选用s 曲线减速的操控战略。为了避免体系到位后轰动,规划到位后,又会恰当减小体系的增益。所以,点位运动操控器往往具有在线可变操控参数和可变加减速曲线的才能。
接连轨道运动操控
该操控又称为概括操控,首要运用在传统的数控体系、切开体系的运动概括操控。相应的运动操控器要处理的问题是怎么使体系在高速运动的情况下,既要保证体系加工的概括精度,还要保证刀具沿概括运动时的切向速度的稳定。对小线段加工时,有多段程序预处理功用。
同步运动操控
是指多个轴之间的运动和谐操控,可所以多个轴在运动全程中进行同步,也可所以在运动进程中的部分有速度同步,首要运用在需求有电子齿轮箱和电子凸轮功用的体系操控中。工业上有印染、印刷、造纸、轧钢、同步剪切等职业。相应的运动操控器的操控算法常选用自适应前馈操控,经过主动调理操控量的幅值和相位,来保证在输入端加一个与搅扰幅值持平、相位相反的操控效果,以按捺周期搅扰,保证体系的同步操控。
运动操控器的运用举例
敞开式运动操控体系的硬件结构
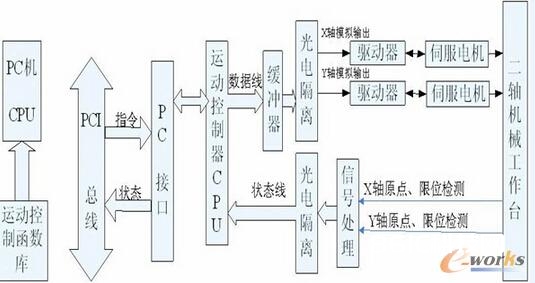
图2 二轴运动操控体系结构图
如图2所示,整个体系以依据“pc机+运动操控器”为中心,选用ni公司ni7340系列运动操控器ni7342、telemecanique驱动器和沟通伺服电动机构成一个敞开式硬件结构。在该伺服操控体系中,操控器上专用cpu与pc机cpu构成主从式双cpu操控方法。pc机担任人机交互界面的办理和操控体系的实时监控等方面的作业,例如键盘和鼠标的办理、体系状况的显现、操控指令的发送和外部信号i/o的监控等。运动操控器装备内容丰厚、功用强壮的运动函数库,供用户运用完结电动机的运动规划。体系采纳模拟量输出的方位操控方法,图2中,模拟信号的巨细操控电机的速度,信号的正负操控电机正回转,以完结二轴的方位操控。x轴和y轴原点、限位检测是经过一组机械来完结,原点检测开关作为每个轴的零点方位,限位检测开关保证每轴作业行程极限。这些状况信号送入运动操控卡状况寄存器后由cpu随时读出,到达对i/o状况信号的检测。在硬件上,运动操控器上的光电阻隔办法既阻隔了外设对内部数字体系的搅扰,有能有用避免过电压、过电流等外界突发事件对计算机体系的损坏,大大进步了体系的操控精度和可靠性。
运动操控体系的软件开发
运动操控器一同还装备有运动函数库,函数库为单轴及多轴的步进或伺服操控供给了许多运动函数,如单轴运动、多轴独立运动、多轴插补运动以及多轴同步运动等等。依据ni7342运动操控器组成的操控体系,可选用labview、vb、vc多种言语开发用户自己的运用程序。因为labview自身同为ni公司产品,运用它开发是最支撑也是最便利的。作为一种图形化编程言语,它和其他高档言语相同,供给各种循环和结构,以虚拟仪器vi (virtual instrument)的方法替代其他言语的函数功用,ni专门为用户供给了运动操控的vi-ni-motion,用户运用labview技能编写图形程序可以便利的完结调用,一同也便于规划友爱的人机界面,便于人机交互和办理。体系的程序结构模块如图3所示,除了主体的运动操控程序外,还包含初始化、与pc实时数据交互、体系维护、状况监测等部分。labview内置了便于运用tcp/ip、activex等软件规范的库函数。运用它还可以便利地树立自己的虚拟仪器,其图形化的界面使得编程及运用进程都生动有趣。
正是因为运动操控卡的敞开式结构,强壮而丰厚的软件功用,关于运用者来说进行二次开发的规划周期缩短了,开发手法增多了,针对不同的数控设备,其柔性化、模块化、高功用的优势得以被充分运用。
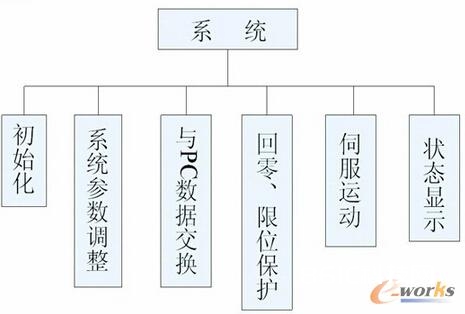
图3 二轴体系软件模块
运动操控器的开展现状与趋势
运动操控技能的开展是制作主动化行进的旋律,是推进新的产业革命的关键技能。运动操控器选用了敞开式结构,运用简洁,功用丰厚,可靠性高。若选用pc机的pci总线方法,卡上无需进行任何跳线设置,一切资源主动装备,并且一切的输入、输出信号均用光电阻隔,进步了操控器的可靠性和抗搅扰才能;在软件方面供给了丰厚的运动操控函数库,以满意不同的运用要求。用户只需依据操控体系的要求编制人机界面,并调用运动函数库中的指令函数,就可以开宣布既满意要求又本钱低价的多轴运动操控体系。运动操控器现已从以单片机或微处理器为中心的运动操控器和以专业芯片(asic)作为中心处理器的运动操控器,开展到了依据pc总线的以dsp和fpga作为中心处理器的敞开式运动操控器。一同,将运动操控技能与网络技能有机结合是当时一个新的研讨开展方向。在一般的操控器与驱动器的操控架构下,存在配线多、同步特性差、非全数字化等缺陷,并且很难由外界操控器度曲并实时调整伺服参数。跟着以太网技能的开展与运用,可以运用网络通讯的计划来处理传统运动操控架构中的问题。例如在串行运动操控网络中,ieee-1394、sercos-ⅱ等通讯协议被广泛选用,它们的硬件传输前言首要是rs-485、光纤、fire wire和以太网。
结语
运动操控器的运用现已广泛很多范畴,特别是在沟通伺服和多轴操控体系中。它可以充分运用计算机资源,便利地协助用户完结运动轨道规划、完结既定运动和高精度的伺服操控。运动操控技能将不断和沟通伺服驱动技能、直线电机驱动技能等相结合,促进我国机电一体化技能不断进步。






