


转向体系是轿车的重要组成部分,其功能直接影响着轿车行进的稳定性和安全性。前期的轿车转向体系为纯机械转向体系,没有助力,转向动力完全由驾驭员供给,驾驭体会差。从上世纪30年代今后,逐步呈现了助力转向体系。现在,轿车助力转向首要有3种方法:液压助力转向体系(Hydraulic Power Steering,HPS),电控式液压助力转向体系(Electric Hydraulic Power Steeing,EHPS)以及电动助力转向体系(Electric Power Steering System,EPS)。比较前两种,EPS由电机供给辅佐力矩,没有油体系,很大程度下降了轿车转向体系的复杂度,且在燃油功率、模块化、助力作用和环境友好性等各方面具有显着的优势。依据EPS助力电机在齿轮和转向柱总成上方位的不同,EPS体系分为转向柱助力式、齿条助力式、小齿轮助力式和双小齿轮助力式4种类型。小齿轮和转向柱助力式应用于轻型车辆,双小齿轮助力式应用于重型车辆。它们在构成上都具有3个根本部件:电控单元(Electrie Control Unit,ECU)、助力电机和安装在转向柱上的扭矩传感器。文中针对小型轿车,以美国Freescale公司的16位单片机MC9S12DP256为中心进行了EPS操控器的规划。
1 电动助力转向体系结构和作业原理
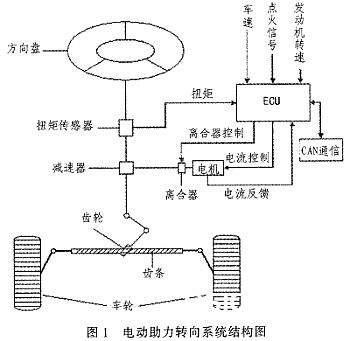
电动助力转向体系结构如图1所示,首要由方向盘、扭矩传感器、电子操控单元(ECU)、电机、电磁离合器、减速组织、齿轮齿条转向器组成。在轿车发动机焚烧后,滚动方向盘时,由安装在转向轴上的扭矩传感器测得转向力矩,并送给ECU,ECU依据转矩和车速,通过预先设置好的助力特性曲线和操控战略核算出一个电机所需的最佳电流,然后操控电机输出力矩和滚动方向,然后通过减速组织施加到转向组织,终究得到一个与行进工况相适应的转向作用力,辅佐驾驭员转向。
2 操控战略
2.1 EPS模型树立
依据牛顿定律,可树立转向体系数学模型。
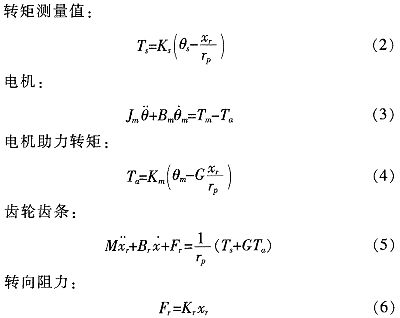
其间:Th为方向盘输入转矩,Js为转向柱、盘总成滚动惯量,Bs为输入轴阻尼系数,Ks为力矩传感器刚度系数,Tm电机输出力矩,Km为助力电机和减速组织的刚度系数,Jm为助力电机滚动惯量,Bm为助力电机阻尼系数,M为齿条质量,Br为齿条和转向轮粘性阻尼系数,Kr为齿条当量刚度,G为助力组织传动比,rp为小齿轮半径,θs为方向盘转角,θm为电机转角,xr为齿条位移,Fr为转向阻力。
2.2 助力特性曲线规划
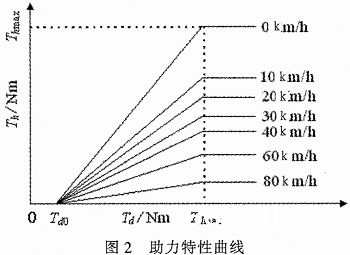
EPS助力特性是驾驭员输入转矩和电机助力力矩(助力电流)之间的联系。轿车内行进过程中,转向阻力跟着车速的添加而下降。为了取得轿车低速行进时转向的简便性和高速行进时的稳定性,在同种行进情况下,电机助力力矩跟着车速的升高而减小,并在车速超出必定规模时,电机不进行助力。常见的助力特性曲线有3种:直线型、折线型和曲线型。直线型助力特性曲线方法简略,实践中简略调理和完成。因而,文中选用直线型助力特性进行操控器规划。直线型助力特性可表示为如下函数联系:

其间:Th为电机方针力矩,f(v)为车速感应系数,Tmax为电机最大助力力矩,Td0为开端助力时驾驭员输入最小力矩,Tdmax为电机供给最大助力时驾驭员输入力矩。
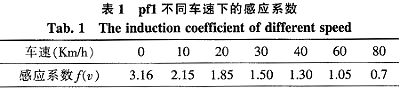
助力特性参数确认:Td0=1 Nm,Tdmax=7.6Nm,Thmax=21Nm。车速感应系数按照表1所示规矩确认(终究需求实车测验后进行批改),车速超越80 km/h时,电机不进行助力。
依据上述参数,助力特性曲线规划如图2所示。
电机方针电流能够由式(8)取得:
式中,ki为电机转矩系数,G为电机减速组织传动比。
2.3 操控算法
EPS体系操控是对电机电流巨细和方向的操控。其操控算法的好坏直接影响着转向体系的功能。本文选用现在广泛应用于工业操控范畴的PID操控算法。PID操控稳定性和可靠性高、实时性强、且操控与调试办法简略,易于完成,合适用于轿车电动助力转向体系的操控。因而,PID操控是现阶段EPS操控体系首要的操控战略。
PID操控的表达式可表示为:

其间:r(t)为助力电机电流方针值,y(t)是操控体系实践输出值,u(t)为PID操控器的输出信号,Ti为积分时间常数,Td为微分时间常数。EPS操控体系的中心是选用数字信号的单片机。因而,需求对式(10)进行如下处理:
为了减小核算量,进步转向体系的实时性,本规划选用增量式PID操控,用操控量的增量△u作为作为操控器的输出。其完成办法如下:
设助力电机方针电流为i,实践当时助力电流为io,则操控误差为:
ek=i-io (12)
△u=u(k)-u(k-1) (13)
助力电机方针电流能够由单片机依据当时车速、输入转矩、助力特性曲线核算得到。然后由式(11)、(12)、(13)可取得对应的PWM增量△u。
PID参数能够由试凑发开始得到,然后依据实验成果进行批改。
3 硬件规划
3.1 总体规划
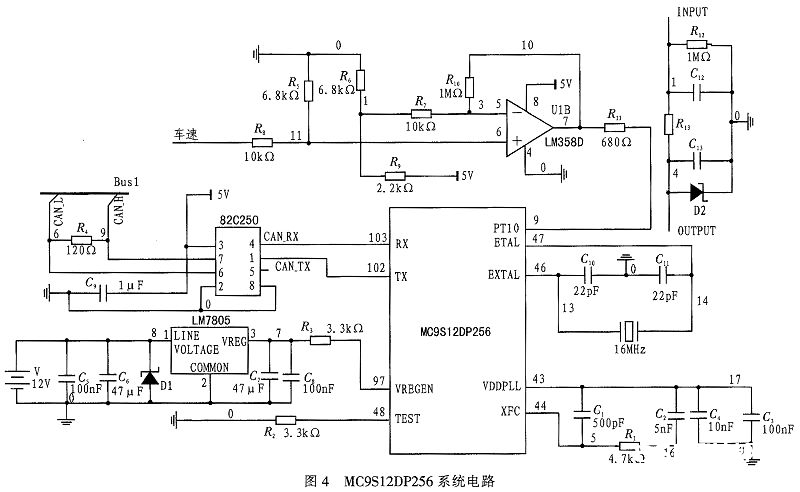
单片机是操控器的中心,其选型需求考虑适用性、可靠性、片内资源、价格等多种要素。单片机选型恰当与否直接影响组织操控体系的功能及规划难易程度度。本规划选用Freescale公司的16位高精度MC9S12DP256单片机。MC9S12DP256内置5个CAN模块、2个8通道10位A/D转化模块、8个PWM通道,总线速度25 MHz,选用5 V供电,112脚LQFP封装。此单片机,内部资源丰厚,可大大简化操控体系硬件电路,其可靠性高,十分适用于EPS操控。规划中没有用到的管脚引到电路板上,以便于后续开发。
硬件规划如图3所示。车速、发动机、转矩信号经处理后送给MC9S12DP256单片机,经单片机核算后,得到电机助力电流值,经驱动电路后作用于助力电机,操控电机输出力矩的巨细和方向,一起对电机电流进行采样,并送回单片机,构成闭环操控。在助力操控根底上,规划了电机维护电路和毛病诊断与提示电路。一旦检测到毛病存在,当即断开离合器,改用纯手动转向,并宣布毛病信号,然后确保了行车安全。

3.2 操控体系硬件电路规划
硬件电路规划首要包含电源转化电路、扭矩信号处理电路、车速信号处理电路、CAN通讯电路、时钟电路。详细规划如下:
电源转化因为单片机作业时管脚电压为+5 V供电,而车载电源电压为+12 V。因而,需求对+12 V电压进行转化,变成+5 V。本规划中选用7805电压转化芯片进行电压改换。
扭矩信号处理因为改变传感器取得的是一些弱小的小信号,简略受搅扰,因而需求对其进行滤波处理。本规划选用型滤波电路,R12取大电阻,进步输入阻抗。
车速处理电路车速信号为+12 V单极性方波,电压太高,不能直接用于单片机,需求将其改换为+5 V以内的方波。使用LM358对其进行处理,经转化后得到高电平为3.72 V,低电平为0.01V的方波信号。
CAN总线驱动电路MC9S12DP256内部集成了CAN总线操控器,CAN驱动电路只需求物理层驱动即可。本规划选用82C250芯片进行规划。
时钟电路时钟是单片机作业的根底。MC9S12DP256单片机内部集成了压控振荡器,可在其43、44和46、47引脚别离接上锁相环电路和16MHz的晶振电路。组成MC9S12DP256时钟电路,供给25MHz的时钟信号。
详细电路规划如图4所示。
4 体系软件规划
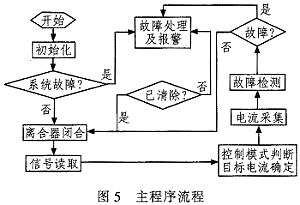
EPS操控软件选用模块化规划,包含进行体系初始化、信号收集、操控状况判、操控形式判别、PWM占空比核算、体系状况监控及维护、电流闭环模块、通讯模块等。EPS操控体系需求一起履行多个使命,为了确保体系的实时性和可靠性,选用中止服务方法,将整个软件部分分为主程序和中止服务子程序。主程序规划流程如图5所示。
5 结束语
文中剖析了轿车电动助力转向体系的作业原理.规划了直线型助力特性曲线,树立了增量式闭环PID操控战略,减小了芯片的核算量,增强了体系的助力跟从性。使用MC9S1 2DP256单片机的丰厚内部资源,简化了EPS硬件电路体系,下降了电路间的搅扰,然后提升了体系可靠性,规划了根据MC9S12DP256的EPS操控体系硬件电路,并给出了软件规划流程。本文规划的EPS体系能够编写多种EPS操控算法,有利于后续深入研讨。关于操控功能的优化将在进一步的操控战略研讨和实验中进行。






