


纳型卫星是指质量在1~10kg 之间的卫星。与微型卫星比较, 纳型卫星对遥感体系在质量、体积、功耗等方面的要求愈加严苛。现在广泛用于微型卫星遥感体系的电荷耦合器材CCD很难满意纳型卫星的运用要求。CMOS图画传感器选用规范的CMOS 技能, 承继了CMOS 技能的长处, 如静态功耗低、动态功耗与作业频率成份额、噪声容限大、抗干扰能力强、特别适合于噪声环境恶劣条件下作业、作业速度较快、只需求单一作业电源等。尽管 CMOS 器材的研讨还未彻底老练, 如电离环境下暗电流稍大等问题还没有很好地处理,还不能彻底替代CCD, 但不可否认CMOS 器材将是未来遥感传感器的发展方向。本文规划了一套纳型卫星CMOS 遥感体系, 并对其进行了热循环试验研讨。
1 纳型卫星遥感体系的规划
1. 1 遥感体系总体规划
纳星遥感体系如图1 所示, 包含镜头、CMOS图画传感器、现场可编程门阵列FPGA、静态随机存储器SRAM 和微操控器5 部分。
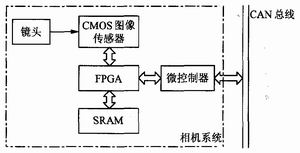
图1 纳星遥感体系框图
1. 2 光学体系规划
1) 焦距规划
遥感相机光学体系的原理如图2 所示。图顶用一个透镜代表实践光学体系的透镜组, 暗示了视场中地上景象的最小可分辩单元在成像面上发生一个相应的点。关于卫星遥感相机的光学体系, 由于成像物距等于卫星轨迹高度h, 相关于焦距f 来说可以为是无穷远, 所以可以为光线都是近轴的平行光。这些近轴平行光经过光学体系的透镜组后, 汇聚在透镜组的焦平面上。因而, 从透镜组中心到焦点的距离, 焦距将大体上决议聚光体系的长度, 而光学体系的理论分辩率则首要由光学孔径D决议。
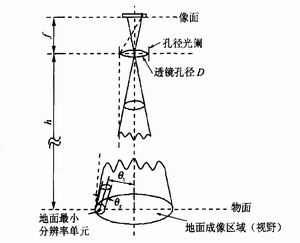
图2 光学体系原理图
在实践规划中, 焦距通常是依据地上分辩率和图画传感器的巨细经过下式来确认的:

式中: h为卫星到地上的距离, rd为CMOS图画传感器勘探面半径, R为相机成像掩盖半径。
2) 光学孔径规划
为确保成像器材勘探面取得满意的曝光量, 依据遥感光学体系的经历核算相机光学体系的光圈数:

实践规划中, 一般取F≤4~5。
遥感相机光学体系可近似为望远镜体系, 其最小分辩角, 即望远镜分辩率, 可用刚好能分辩开的两物点对体系的张角θr 表明, 依据望远镜分辩率和Rayleigh 衍射判据有如下核算式:

式中λ为中心波长。光学体系在平整地上上的理论分辩率为

式中θt为地物中心对光学体系的张角。
规划中应归纳考虑式(2) 和(4) 的成果, 选定的规划参数在确保遥感体系取得满意光照的情况下,要一起满意规划分辩率的要求。
1. 3 电子体系规划
考虑到星地相对运动速度, 每幅图画的曝光时刻约为几毫秒, 故规划中选用现场可编程门阵列(FPGA ) 对CMOS 图画传感器进行时序操控, 并将输出的图画数据保存到SRAM 中。当需求传输图画的时分, 由FPGA 将保存在SRAM 中的图画数据读出, 经过CAN总线传至星上数据处理体系。
1) 器材选型
CMOS 图画传感器按照像元电路可分为无源像素传感器(PPS) 和有源像素传感器(APS)。现在国际上可以买到的分辩率抵达106级以上的CMOS图画传感器并不多, 价格差异也很大, 规划中应依据CMOS 图画传感器的光学要求和商场情况归纳选型。为确保成像质量, 纳型卫星上宜选用CMOS 有源像素传感器。
FPGA依据完结技能机理的不同, 可分为反熔丝型、EPROM或EEPROM型、Flash型、SRAM型等几种。依据航天器材要求, FPGA 操控器材宜挑选反熔丝型FPGA 产品。挑选SRAM 时, 首要考虑图画数据量要求以及SRAM的数据端口位数、存取时刻、作业温度、功耗等要素。
CAN 总线接口的首要任务是接纳星上数据处理模块发来的指令, 完结对相机的相关监控, 将取得的图画数据分时发送给星上数据处理模块。本文选用的微处理器在MCS251 系列单片机的根底上集成了CAN 操控器, 既可以完结对遥感体系简略的监控功用, 又可以方便地完结CAN 通讯功用。
2) FPGA 操控器规划
作为相机成像模块的操控中心, FPGA 担任发生一切重要的操控时序, 包含发生CMOS 图画传感器的作业时序, 把读出CMOS 图画传感器数据存到SRAM 中; 将存放在SRAM 中的图画数据分时输出。整个FPGA 的传输模型如图3 所示。
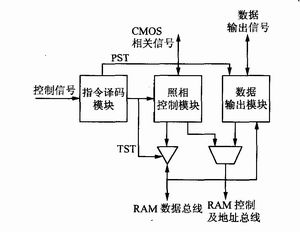
图3 FPGA 规划模型图
FPGA 对CMOS 图画传感器的成像操控如状况转换图4 所示。当体系启动后, FPGA 先向CMOS 图画传感器宣布芯片复位指令, 芯片复位完结后, 让Reset 指针沿着像素矩阵逐行移动, 而使Read 指针保持在初始方位(第0行) , 进行读前行复位。当Reset 指针抵达某一方针行, 其间所距离的时刻满意积分时刻时, 即开端激活Read 指针, 并开端移动Read 指针, 进行读取。如此循环替换移动两个指针, 不断进行读间行复位、行读取、读间等候, 即可确保整个像素阵列各行都契合所要求的积分时刻。
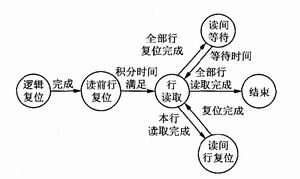
图4 FPGA 状况转换图
3) CAN 总线接口规划
CAN 总线接口的首要任务是接纳星上数据处理模块发来的指令, 监控遥感相机模块的作业状况,包含遥感相机模块的电源操控、电流监测、温度监测、曝光时刻操控等功用, 并将取得的图画数据分时发送给星上数据处理模块。规划上, 星上数据处理模块发来的指令会使微操控器进入中止, 设置相应的标志。微操控器查询各标志的改变, 依据星上CAN通讯协议完结相关动作, 包含监测遥感模块作业温度、作业电流, 设置曝光时刻, 进行图画数据传输等操作。






