


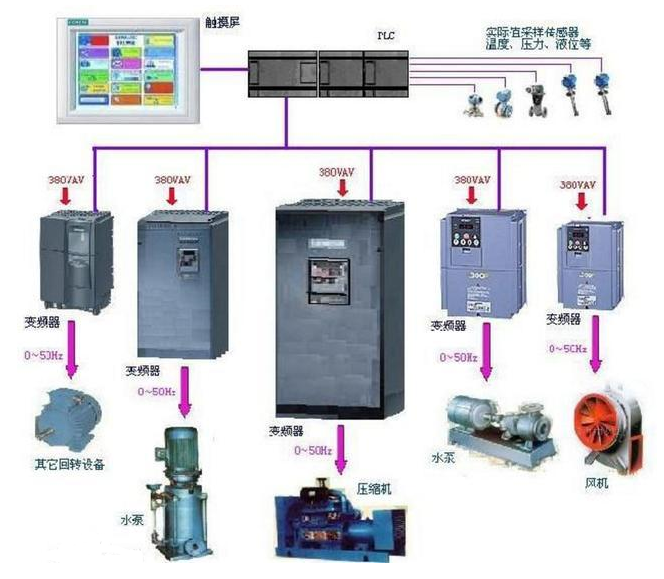
自动操控体系的功能目标
工程上常把对自动操控体系的基本要求概括为安稳性、准确性、快速性三个方面来衡量自动操控体系。
1.安稳性(稳)
安稳作业是对一切自动操控体系的基本要求,是一个体系能否作业的条件。不安稳的体系底子无法完结操控使命。考虑到实践体系作业环境或参数的改变,或许导致体系不安稳,因而除要求体系安稳外,还要求其具有必定的安稳裕量。
2.准确性(准)
稳态精度是指体系过渡到新的平衡情况今后,或体系对立搅扰从头康复平衡后,终究坚持的精度。稳态精度与操控体系的结构、参数及输入信号方式有关。
3.快速性(快)
操控体系不光要求安稳,并且要求被控量能迅速地依照输入信号所规则的规则改变。即要求体系具有必定的呼应速度。
操控体系的功能目标
操控体系功能点评分为动态功能目标和稳态功能目标两类。为了求解体系的时刻呼应(咱们重视的性质)。有必要了解输入信号(即外效果)的解析表达式。然而在一般情况下,外加输入有随机性无法预知。
典型输入信号
研讨剖析体系的功能目标时,一般挑选若干典型输入信号作为动态功能目标和稳态功能测验之用,典型输入信号包含:
单位阶跃函数
单位斜坡函数
单位加速度函数
单位脉冲函数
正弦函数
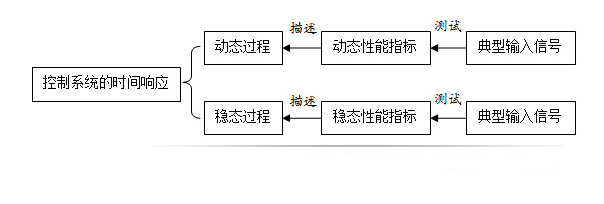
实践中选用上述哪种典型输入信号取决于体系常见的作业情况。一起,在一切或许的输入信号中,挑选最晦气的信号作为典型输入信号测验体系目标。在典型输入信号效果下,任何操控体系的时刻呼应都有动态进程和稳态进程两部分组成。因而,体系的时刻呼应、动态、稳态进程与动态、稳态功能目标以及典型输入信号的联系如下图所示。
动态进程与动态功能目标
动态进程
动态进程又称过渡进程或瞬态进程,指体系在典型输入信号效果下,体系输出量从初始情况到终究情况的呼应进程。因为实践操控体系具有惯性、冲突及其他原因,体系输出量不或许彻底复现输入量的改变。依据体系结构和参数的挑选,动态进程表现为衰减、发散、等幅振动等方式。
动态功能
体系的动态进程供给体系安稳性、呼应速度及阻尼情况,由动态功能目标描绘。一般在阶跃函数效果下,测定或核算体系的动态功能。描绘安稳的体系在单位阶跃函数的效果下,动态进程随时刻t的改变情况的目标,称为动态功能目标。体系的单位阶跃呼应如下图所示。
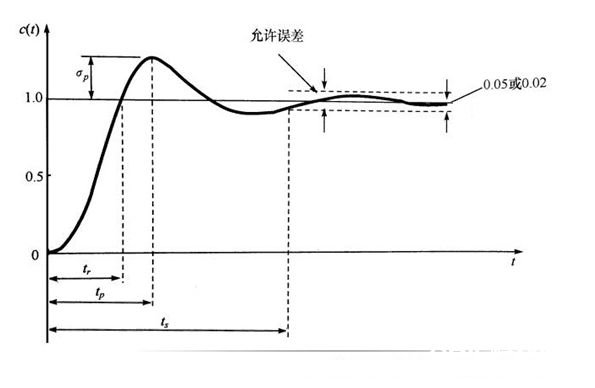
上升时刻(rise TIme)tr
指呼应从终值10%上升到终值90%所需的时刻;关于有振动的体系,也可定义为呼应从零第一次上升到终值所需的时刻。上升时刻tr是体系呼应速度的一种衡量。上升时刻越短,呼应速度越快。
峰值时刻 tp
指呼应超越其终值抵达第一个峰值所需的时刻。上升时刻tp是体系呼应速度的一种衡量。
调理时刻(setTIngTIme)ts
指呼应抵达并坚持在终值±5%(或±2%)内所需的最短时刻。调理时刻ts是点评体系呼应速度和阻尼程度的归纳目标。
超调量(overshoot):σ %
指呼应的最大违背量c(tp)与终值c(∞)之比的百分数,即
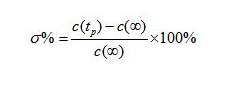
若c(tp)《c(∞),则呼应无超调。σ%点评体系的阻尼程度。
稳态进程与稳态功能目标
稳态进程
稳态进程指体系在典型输入信号效果下,当时刻t趋于无量时,体系输出量的表现方式。稳态进程又称为稳态呼应,表征体系输出量终究复现输入量的程度,供给体系有关稳态差错的信息,用稳态功能描绘。
稳态功能——稳态差错(steady-state error)
稳态差错是描绘体系稳态功能的一种功能目标,一般在阶跃函数、斜坡函数或加速度函数效果下进行测定或核算。若时刻区域无量时,体系的输出量不等于输入量或许输入量的确认函数,则体系存在稳态差错。稳态差错是体系操控精度或抗扰动才能的一种衡量。






