


军方一直是传感器数据交融的前驱,“经过运用来自多个分布式源的数据,可以取得更低的检测过错概率和更高的可靠性”。
现在,智能手机和轿车中的高档传感运用常常运用传感器交融。可是,先进的工业运用(例如杂乱的机器人)也利用了该技能。传感器交融实际上是数据交融的子类别,也称为多传感器数据交融或传感器数据交融。
关于智能手机中的方位感测,来自加速度计,陀螺仪和磁力计的数据相结合,可提供比独自运用任何这些传感器都能取得的更好的成果。在轿车中,来自雷达,LiDAR和相机的数据以及地图和其他数据源被组合在一起,以在自动驾驶情况下做出决议计划。在机器人中,来自视觉体系和惯性丈量单元(IMU)的数据被组合在一起,以改进机械臂的运动并进步采样率。
军方一直是传感器数据交融的前驱,“经过运用来自多个分布式源的数据,可以取得更低的检测过错概率和更高的可靠性”。
1987年,美国国防部(DOD)实验室联合主管(JDL)数据交融小组拟定了数据交融的界说,该界说进一步完善为“多层次,多方面的进程,触及自动检测,相关,相关,估量,以及来自单一或多个来历的数据和信息的组合。”
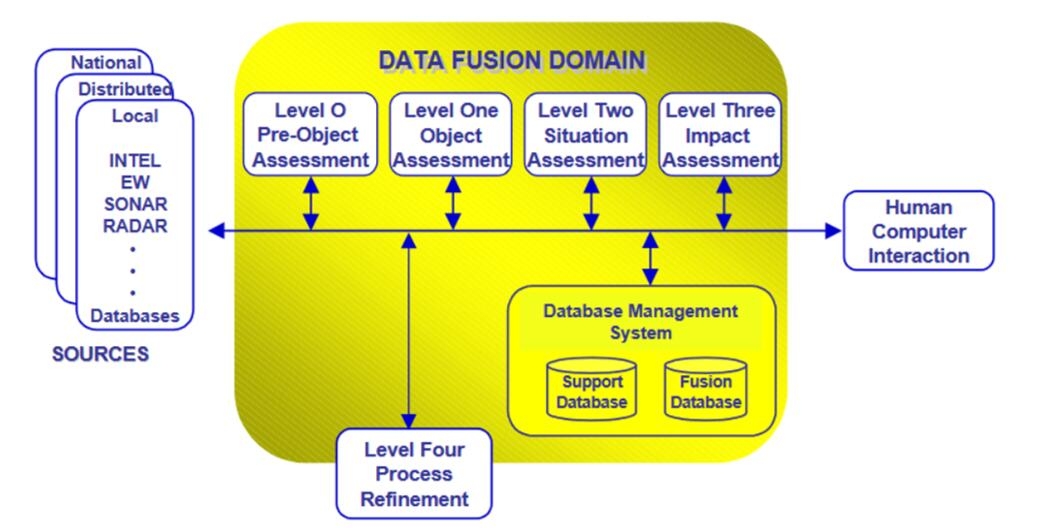
JDL数据交融进程模型的顶层视图
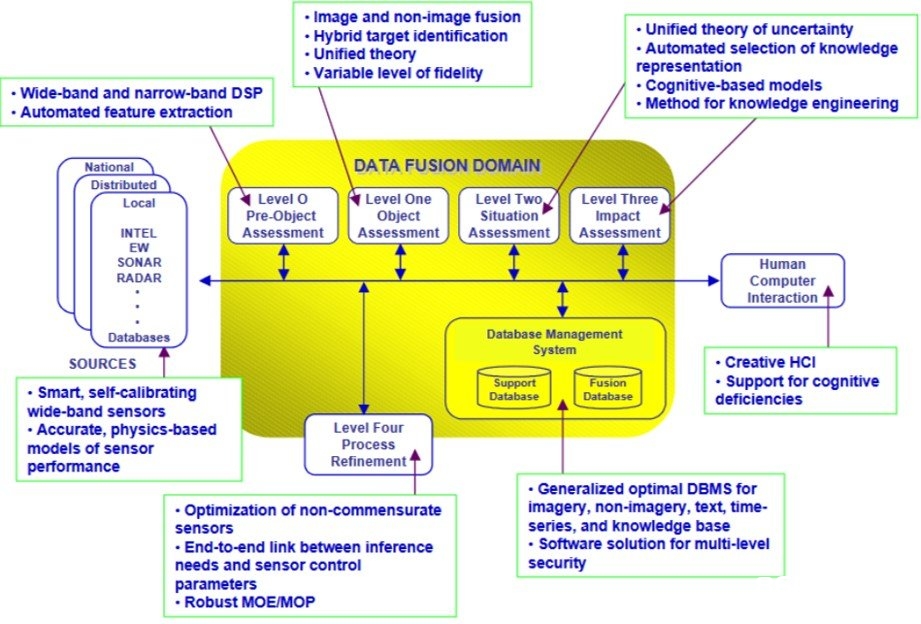
传感器数据交融的技能要求






