


本文在硬件电路规划上选用DSP 芯片和外围电路构成速度捕获电路,电机驱动操控器选用微操控芯片和外围电路构成了电流采样、过流维护、压力调度等电路,运用CPLD完结无刷直流电机的转子方位信号的逻辑换相。在软件规划上,软件以C言语和汇编言语相结合的办法完结了体系的操控。最终提出了含糊操控调度PID参数的操控战略。
1 导言
赛车刹车体系是赛车体系上具有相对独立功用的子体系,其效果是接受赛车的静态分量、动态冲击载荷以及吸收赛车刹车时的动能,完结赛车的制动与操控。其功用的好坏直接影响到赛车的快速反应、安全制动和生存能力,从而影响赛车的全体功用。本文规划了赛车全电防滑刹车操控器的硬件和软件,最终研讨了适合于赛车刹车的操控律。
2 体系硬件电路规划
本赛车刹车操控器是由防滑操控器和电机驱动操控器组成。两个操控器都是以DSP芯片为中心。防滑操控器首要是以滑移率为操控目标,输出给定的刹车压力,以 DSP芯片为CPU,外加赛车和机轮速度信号调度电路等。电机驱动操控器首要是调度刹车压力巨细,而且操控电动机电流巨细,也是以DSP芯片为CPU,再加外围电路电动机电流反应调度电路、过流维护电路、刹车压力调度电路、四组三相全桥逆变电路等构成电机驱动操控器。
2.1 DSP的最小体系
DSP的最小体系首要触及存储器扩展、JTAG接口装备、复位电路、ADC模块的设置以及时钟电路的规划等。
1、片外存储器扩展。
片外存储器是为了补偿DSP内部RAM的缺乏,一起也考虑到调试进程中能够便利将程序下载到片外高速StaTIc RAM中。外部的静态随机存储器选用CY7C1041CV33。DSP既能够运用片内程序存储器,也能够运用片外程序存储器,这由引脚XMP刀MC决议的。JTAG接口。在程序需求调试时,程序下载是通过JTAG接口完结的,这个接口通过仿真器与PC机的并行口相连。
2、复位电路与时钟源模块。
用阻容电路发生上电复位和手动复位的低电平复位电路,发生复位信号。外加一个硬件看门狗,其输出端发生复位信号WDRST。电源芯片的两个输入都为+5V,输出为+1.9V和+3.3V电源为DSP供电,输出电源别离有两个复位信号,当电源不稳或过低时,将发生复位信号。
3、模数转化ADC模块的硬件装备。
模数转化ADC输出电压2V,要求输出端接一个低的ESR容量为10μF的陶瓷电容到模仿地。假如软件设置在外部参阅方法下,ADCREFP能够接外部输入为2V的参阅电压,而且接一个低的ESR容量为1μF到10μF的电容。不然,AD的内部参阅源的精度将受到影响。
2.2赛车前轮与刹车机轮速度信号处理电路
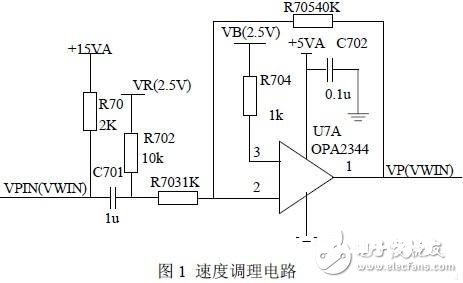
赛车防滑操控器首要是以滑移率为操控目标,避免赛车打滑,由滑移率的误差巨细调度后输出压力参阅值,以盯梢给定的滑移率巨细。防滑操控器上有必要有赛车前轮和刹车机轮速度信号的调度电路,首要是为了得到反应的滑移率。赛车速度信号是以自在翻滚的赛车前轮速度信号替代。在赛车的前轮与刹车机轮上都装有测速传感器,当轮子翻滚时,测速传感器会发生正弦波方法的沟通信号,机轮每翻滚一圈,测速传感器宣布50个周期的正弦沟通信号。正弦沟通信号的振幅随轮子速度的改变而改变,其信号为偏压2.5V,峰值为0.3V,最大信号幅值不超越5V的正弦波信号。将此正弦波信号转化成同频率的方波后送入DSP的捕获单元,捕获方波相邻上升沿的计数值距离ncapture,即可核算得到轮子的转速值V。因为CPUCLK为150MHz,捕获时基为其间的一个守时器,n为 CPUCLK的分频系数,凡为轮子的翻滚半径,那么轮子速度的核算式为:

调度电路如图1所示:
2.3 逻辑信号电路
电机驱动器选用ALTERA公司的MAX7000A系列器材对电机的转子方位等信号进行逻辑处理,选用多达有76路可编程I/0口和100引脚的 EPM7128AE,该CPLD能够满意体系规划要求。器材EPM7128AE完结了电机的三相全桥逆变电路触发信号、过流维护、正回转、三相全桥的注册与关断等功用。一片CPLD器材EPM7128AE上有两个电机的逻辑信号。因为无刷直流电动机的霍尔方位传感器CS3020的输出是集电极开路结构,故上拉2KΩ电阻,再把霍尔信号SA, SB, SC送到CPLD的输入端口。其JTAG接口的TMS, TCK, TDI, TDO四个端子有必要接上拉电阻,再接+5V电源。
2.4 无刷直流电动机的功率驱动电路
无刷直流电动机的功率驱动电路选用以IR公司的专用驱动芯片IR2130为中心的6个N沟道的MOSFET管组成的三相全桥逆变电路。其输入为以功率地为地的PWM波,送到IR2130的输入端口,输出操控N沟道的功率驱动管MOSFET,由此驱动无刷直流电动机。选用这种驱动方法首要是功率驱动芯片 IR2130对“自举”技能构成悬浮的高压侧电源的奇妙运用,简化了整个驱动电路的规划,提高了体系的可靠性。而且IR2130驱动芯片内置死区电路,以及过流维护和欠压维护等功用,大大降低了电路规划的复杂度,进一步提高了体系的可靠性。
2.5 电流采样及过流维护电路
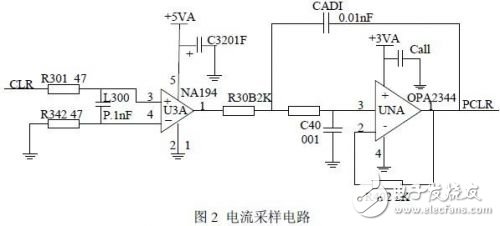
无刷直流电动机的电流是通过功率驱动电路母线上的电阻进行检测的。母线上面的电阻是由两个0.01Ω的功率电阻并联,采样电路是通过这两个并联的采样电阻进行电流采样的,采样电阻将电流信号转化为电压信号,电压信号送到电流监控芯片进行扩大,然后通过由OPA2344构成二阶有源滤波电路滤波,最终得电流反应信号,直接送到A/D转化器。
硬件过流维护电路,对体系的正常作业起到很重要的效果,首要是对功率器材MOSFET和电动机的维护。体系还带有软件维护功用,过流信号OVCURX送到 DSP的输入引脚,当OVCUR为高电平时,DSP会发生电机操控翻滚信号ENABLE关断逻辑信号,使电机停转。芯片IR2130本身带有过流维护功用。
2.6 压力信号扩大电路及其调度电路
压力信号扩大器选用差分式完结的减法运算的扩大电路,以超低漂移电压运算扩大器为中心,扩大倍数为40倍,扩大器还配有调零位和灵敏度调度的功用。其间芯片7809为电源芯片7660供给+9V电压的,芯片7660将+9V的电压变为-9V,这两个电压+9V和-9V一起为OP07供电。
因为从电压信号扩大器出来的电压信号规模为+1V~+5V,而DSP的A/D模块的参阅电压为+3.3V,则采样的电压信号的最大值不能超越+3.3V。因而电压信号要通过调度电路将电压信号减小到+3.3v以下。调度电路选用精细的运算扩大器OPA2344,将电压信号由+1V~+5V调度到+3V以下,需求设定扩大倍数为0.6,以便于DSP进行采样。
3 操控器软件规划
本赛车刹车操控器的软件以C言语为主体,恰当的选用汇编言语,这样的软件编写给整个体系软件带来了便利。C言语使DSP程序的开发速度加速,而且可读性和可移植性也大大添加,在TI公司的C2000 Code Composer Studio(CCS)集成开发环境下进行程序调试。因为篇幅约束,此处仅介绍体系程序初始化以及主程序流程。
1、体系程序初始化。
体系的程序在运转前,有必要对DSP的时钟源、守时器、看门狗、AD模块、I/O口、捕获单元、中止等等进行初始化设置,使体系的内部资源、外围设备和硬件电路相匹配。体系在运转前,有必要关掉一切的中止,以避免程序运转时发生不必要的中止或许程序跑飞等现象。因而在初始化后,体系才发动中止,使程序正常运转。
2、体系主程序流程。
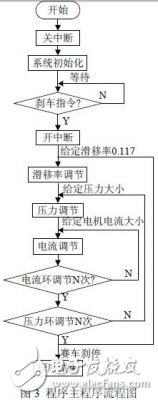
赛车全电刹车体系的主程序包含程序初始化模块、守时器中止服务、模仿量守时采样模块、速度信号的捕获模块、滑移率操控模块、压力调度模块、电流调度模块等等。其间,守时器中止服务程序给电流、压力、滑移率模块供给固定的时钟触发,以此时刻作为各个模块的调度基准。当程序运转时,首要关断体系的总中止,完结初始化,接收到刹车指令后,敞开总中止,进入程序调度的死循环,直到程序运转完毕。电流环调度的时刻最短,反映最快,其调度时刻长短与电流信号滤波参数、 DSP采样速度、CPU时钟周期、软件滤波程序等都有联系,一般时刻为零点几个毫秒。而压力调度环的时刻设定为电流调度环的N倍,电流调度环和压力调度环的调度次数能够现场测定调度时刻而确认,滑移率调度时刻更长。体系的主程序流程图如图3所示。
4 体系含糊操控战略
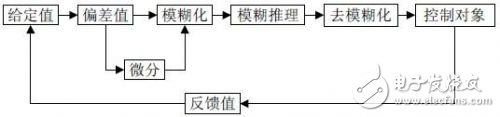
含糊操控器是含糊操控在操控体系中使用的要害部分,其首要进程为将取到的体系操控回路中被控进程输出的准确量进行含糊化,而且作为含糊操控器的输入。含糊操控器的输入和输出都是实践的准确量。然后进行含糊推理,在内部树立言语型的含糊操控规矩,由输入条件判别含糊输出。最终将含糊量转化为实践的准确量,即去含糊化。含糊操控器规划的详细进程如下图4所示。
立异点
本文首要完结了赛车刹车操控体系的规划,首要是硬件规划、软件规划和操控战略研讨。硬件规划方面选用高速的DSP芯片和CPLD并规划其外围的电路。体系还规划了以IR2130为中心的驱动电路,电流信号硬件扩大电路、滤波电路和维护电路,压力信号的扩大电路和滤波电路,赛车速度和机轮速度的处理电路等等。操控战略方面选用含糊操控调度PID参数。






