0 导言
在各种电动机操控战略傍边,直接转矩操控(DTC)办法作为一种优异的高功能计划,其简略的结构、明晰的物理概念以及杰出的操控功能引起了学者们的广泛爱好。DTC 现在在两电平逆变器上已经有许多研讨成果,可是在多电平逆变器上的运用还比较罕见。多电平逆变器克服了传统逆变器较高的dv/dt、di/dt所引起的开关应力,改进了其输出波形,是当时的研讨热门之一[1]。传统两电平逆变器只需6 个非零矢量,完成DTC 时的扇区区分和电压矢量的挑选都已比较老练。而三电平的非零矢量较多,在完成DTC 时,就呈现了怎么更有用、更合理的区分区间和挑选电压矢量的新问题;一起,多电平逆变器的输出电压不能有过高的跳变,而关于运用广泛的三电平中点箝位结构的逆变器而言,还需求操控中点电压的漂移。本文选用了一种依据组成矢量的三电平DTC 操控办法,能够有用地简化DTC 的矢量挑选,一起还成功完成了对输出电压跳变的按捺和对中点电压的操控。
在高功能的电动机操控傍边,能否精确地检测磁链对体系操控功能有着关键性的影响,特别是在低速范围内[2]。本文选用了一种新式自适应全阶状况观测器办法,能够更精确观测定子磁链,并具有较好的鲁棒性,为进步体系操控功能供给了确保,一起能够全速范围内较精确的辨识转速。本文详细描述了一种依据自适应全阶状况观测器的三电平DTC 操控办法,在运用组成矢量办法操控逆变器的基础上,能够精确地观测定子磁链,一起辨识转子转速,完成高功能的DTC无速度传感器 运转。
运转。
1 依据组成矢量的三电平DTC 原理
1.1 三电平电压矢量与DTC
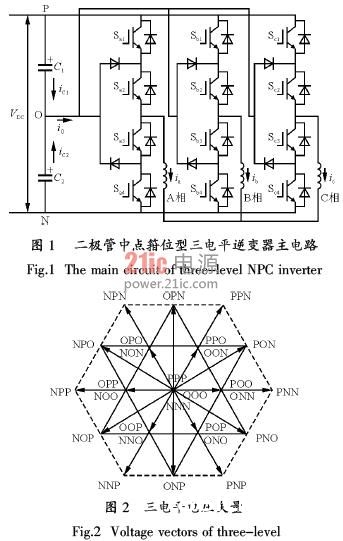
图1 是三电平二极管中点箝位逆变器拓扑结构。三电平逆变器共有27 种开关状况,别离对应于19个电压矢量。依据电压矢量在空间的方位,能够得到三电平逆变器矢量空间图,如图2所示[1]。与两电平DTC 比较,运用三电平逆变器完成DTC,逆变器电压矢量变得丰厚,扇区区分能进一步细化,能够很好的改进转矩的输出特性。但一起,因为三电平逆变器的特色,操控起来也变得愈加杂乱,表现在以下三个方面。
1.1.1 电压矢量挑选杂乱
如上所述,三电平逆变器含有27 种电压矢量,与两电平比较要多得多,能够分为四类:长矢量、中矢量、短矢量和零矢量。其间零矢量有3个,矢量长度为0,别离为PPP,OOO,NNN;6 个长矢量,矢量长度最长,对应图2 中外六边形的极点,别离为PNN,PPN,NPN,NPP,NNP,PNP;6 个中矢量,其长度略短,坐落每个60毅扇区的角平分线上,别离为PON,OPN,NPO,NOP,ONP,PNO;12 个短矢量,其长度仅有长矢量的一半,而且成对呈现,坐落内六边形的极点上,别离为POO,ONN,PPO,OON,OPO,NON,OPP,NOO,OOP,NNO,POP,ONO。
1.1.2 中点不平衡问题
中点不平衡问题是由二极管中点箝位型三电平逆变器自身拓扑结构引起的固有问题,在很大程度上约束了三电平逆变器的广泛运用。为了便利剖析三电平逆变器中点电位不平衡的实质原因,引进函数Sij,其间i 表明第i 相(i=a,b,c),j 表明i相的开关接到哪个点(j=P,N,O),电流方向如图1 所示。
直流侧节点O的电流联系方程为

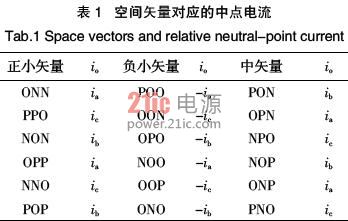
由式(1)不难看出,只需中点有电流,即只需三相中的三个开关有连接到中点O的时分就可能会影响中点的电位。中点电流不为零是导致中点不平衡问题的根本原因。表1 列出了影响中点平衡的矢量与对应的中点电流的联系。
1.1.3 过高幅值跳变问题
在三电平电路中,不管相电压仍是线电压,每次开关动作都要求不能发生超越直流母线电压VDC一半的改变,故应对逆变器输出电压dv/dt加以约束,尤其在高压大功率的运用上。例如相电压不允许在电平P和N之间直接跳变,不然三电平拓扑就失去了自身的优势。而线电压也会发生过高的电压幅值跳变,如矢量切换时线电压跳变幅值超越了直流母线电压的一半,这种状况对逆变电路自身影响不大,但对电机的绝缘要求就大大进步了,所以也应该避免[1]。
1.2 组成矢量办法
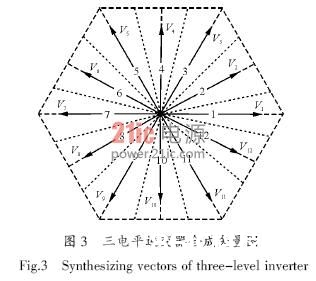
为了处理上述问题,本文选用组成矢量的办法。选用组成矢量办法首要便是要结合体系特征和操控的需求确认适宜的组成矢量计划。如前所述,在三电平逆变器空间电压矢量调制过程中,有两个方面的要素需求特别加以考虑:一是输出电压跳变的按捺,另一个是中点电压的操控。本文选用的组成矢量是由逆变器输出的27个空间电压矢量依照固定的办法组成,均匀地散布在琢-茁平面上,其方向是固定的,仅长度可调,如图3所示。
其间虚线六边形的极点是原三电平长矢量极点的方位,以本来中长矢量地点直线为中心线,将琢-茁平面区分为12 等分,并按图示次序编号。电压矢量Vi(i =1耀12)是地点扇区i的组成矢量,其组成办法是:当i 为奇数时,是由该区间i 所对应的大矢量和两个短矢量组合而成。大矢量自身不会影响中点电压,但会导致过高的电压幅值跳变,运用短矢量有助于消除高电压幅值跳变,为了确保中点电位整体不受影响,组成时两个短矢量的效果时刻有必要相同。例如扇区1 所对应的组成矢量V1 是由大矢量PNN 和两个短矢量POO、ONN 组合而成,且小矢量POO和ONN效果时刻相同。当i 为偶数时,由该区间i 所对应的中矢量和相邻的两个短矢量组成,而且确保三个矢量效果时刻相同,例如扇区2 所对应的组成矢量V2 是由中矢量PON和相邻的两个短矢量PPO、ONN组合而成。因为所选的中矢量和短矢量效果时刻相同,对应的均匀中点电流im=ia+ib+ic=0,假定采样周期满足短,因而中点电压在这个采样完毕后就回到了初始状况,即整体上不受影响。这样就能够有用地将三电平逆变器的PWM操控和异步电动机的DTC 操控加以别离,相对独登时完成不同的操控方针,然后避免了互相矛盾的问题,为进步操控功能拓宽了空间。
1.3 依据组成矢量的DTC
依照上述的办法,在同一采样周期内相邻矢量之间的切换不会发生过高的电压跳变,但在某些状况下,无法避免前后两个采样周期的首尾矢量会发生过高的电压幅值跳变。所以本算法中,在每个周期首尾参加一个固定效果时刻的零矢量(PPP 或许NNN)来完成平稳切换,尽管这样降低了直流侧电压的运用率,可是有用避免了输出电压矢量骤变的问题。
依据三电平逆变器的12 个组成矢量,加上三电平逆变器原有的3 个零矢量,共15 个矢量。依照两电平直接转矩操控的原理,能够建立起一个依据组成矢量的优化矢量表,如表2 所列,其间k 表明当时地点扇区,V表明下一采样周期所选矢量。

2 自适应全阶状况观测器
2.1 全阶状况观测器
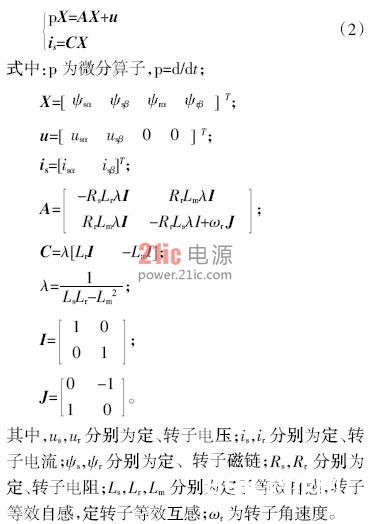
依据一些假定,在两相停止坐标系下,感应电机可用如式(2)所示的状况方程表明。

2.2 速度自适应律选取
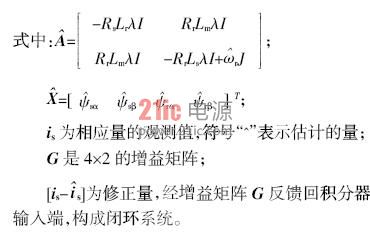
注意到自适应全阶状况观测器对错线性的,所以选用Lyapunov 函数安稳定理来规划速度自适应律[3]。运用式(2)和式(3),能够得到定转子磁链的差错联系为