


1 引 言
边际是图画最根本的特征,是图画切割的第一步。经典的边际检测办法如:Roberts,Sobel,Prewitt,Kirsch,Laplace等办法,根本都是对原始图画中象素的小邻域结构边际检测算子,进行一阶微分或二阶微分运算,求得梯度最大值或二阶导数的过零点,最终选取恰当的阀值提取鸿沟。因为这些算法触及梯度的运算,因而均存在对噪声灵敏、核算量大等缺陷。在实践中,发现SUSAN算法只根据对周边象素的灰度比较,彻底不触及梯度的运算,因而其抗噪声才能很强,运算量也比较小。并将SUSAN算法用于多类图画的边际检测中,试验证明该算法十分合适含噪图画的边际检测。
2 SUSAN边际检测简介
2.1 SUSAN特征检测原理
如图1所示,用一个圆形模板在图画上移动,若模板内象素的灰度与模板中心象素(称为:核Nucleus)灰度的差值小于必定阀值,则以为该点与核具有相同(或邻近)的灰度,由满意这样条件的象素组成的区域称为USAN(Univalue Segment Assimilating Nucleus)。
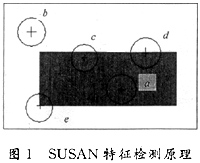
当圆形模板彻底处在图画或布景中时,USAN区域面积最大(如图1中的a和b);当模板移向图画边际时,USAN区域逐步变小(如图1中c);当模板中心处于边际时,USAN区域很小(如图1中的d);当模板中心处于角点时,USAN区域最小(如图1中的e)。能够看出,在边际处象素的USAN值都小于或等于其最大值的一半。因而,核算图画中每一个象素的USAN值,经过设定一个USAN阀值,查找小于阀值的象素点,即可确认为边际点[1]。
2.2 SUSAN边际检测算法
(1)算法描绘
对整幅图画中的一切象素,用圆形模板进行扫描,比较模板内每一象素与中心象素的灰度值,经过与给定的阀值比较,来判别该象素是否归于USAN区域,如下式:

式(1)中c(r,r0)为模板内归于USAN区域的象素的判别函数;I(r0)是模板中心象素(核)的灰度值;I(r)为模板内其他恣意象素的灰度值;t是灰度差门限。
图画中每一点的USAN区域巨细可用下式表明:

式(2)中D(r0)为以r0为中心的圆形模板区域。得到每个象素的USAN值n(r0)今后,再与预先设定得门限g进行比较,当n(r0)
门限t表明所能检测边际点的最小对比度,也是能疏忽的噪声的最大容限。t越小,可从对比度越低的图画中提取特征。因而关于不同对比度和噪声状况的图画,应取不同的t值[2]。
3 实 验
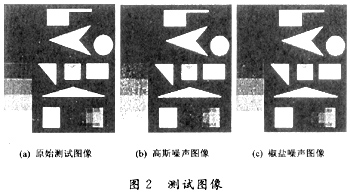
在主频2.3 GHz,内存256 MB的PC机上,分别对SUSAN算法(t=10,g=18)和传统的Robert算子、Gauss-Laplace算子、Prewitt算子,选用Visal C++编程,对图2中的3幅灰度测验图画进行边际检测。图2中(a)是原始测验图画,(b)是参加高斯噪声(μ=0,σ=0.005)的测验图画,(c)是参加椒盐噪声(ρ=O.005)的测验图画。图3~图5分别是对图2中(a)~(c)三幅图画的边际检测成果。
4 功能比较与剖析
由试验成果能够看出,SUSAN算法具有以下优秀功能:
4.1边际检测作用好
不管对直线,仍是曲线边际,SUSAN算法根本上能够检测出一切的边际,检测成果较好。尽管试验中没有到达一个象素的精度,但这首要是因为对边际的两边都使用了SUSAN算法,对详细的实践使用,能够对布景不再使用SUSAN算法,这样不光能够到达细化边际的意图,并且运算量也大大削减。






