


1.导言
$无刷直流电机(Brushless DC Motor,以下简称BLDCM)是跟着电力电子技术及新式永磁资料的开展而敏捷老练起来的一种新式电机。以其发动转矩大、调速功用好、效率高、过载能力强、功用安稳、操控结构简略等长处,一起还保留了一般直流电机优秀的机械特性,广泛应用于伺服操控、数控机床、机器人等范畴。
跟着BLDCM应用范畴的不断扩大,对操控体系规划提出了更高的要求。为此,树立BLDCM操控体系的可视化仿真模型,可以有用的削减操控体系的规划时间,一起充分使用Simulink仿真的优越性,参加不同的扰动以及改变的参数,以便调查体系在不同操控条件下的动、静态特性。在剖析了BLDCM数学模型的基础上,凭借MATLAB的Simulink东西,树立了$BLDCM操控体系的仿真模型,并使用该模型,进行了操控体系的仿真实验,成果标明,经过该仿真模型验证了数学模型的有用性及操控体系的合理性。
2.很多直流电机的总体规划
BLDCM由定子三相绕组、永磁转子、逆变器、转子磁极方位检测器等组成,其转子选用瓦形磁钢,进行特别的磁路规划,可取得梯形波的气隙磁场,定子绕组选用会集整距绕组,由逆变器提供给方波电流。BLDCM梯形波反电动势和方波电流之间的联系,如图1所示。

BLDCM的反电动势波形是梯形波,而且定子和转子间的互感对错正弦的,在此,选用$感应电动机d-q改换理论的办法进行剖析效果不抱负,而直接使用电动机原有的相变量法,依据转子方位,选用分段线性标明感应电动势。
本文以两相导通星形三相六状况办法下,剖析BLDCM的数学模型及电磁转矩等特性。为了便利剖析,作如下假定:
(1)三相绕组彻底对称,气隙磁场散布为梯形波,平顶宽为120°电视点;
(2)疏忽齿槽、换相进程和电枢反响的影响;
(3)磁路不饱满,不计涡流和磁滞损耗;
(4)电枢绕组在定子内外表均匀接连散布。
则依据BLDCM的特性,可树立其电压平衡方程、电磁转矩方程以及转子运动方程。
2.1 电压平衡方程
BLDCM三相定子电压的平衡方程可用以下方程标明:
其间,u a、u b、u c为定子相绕组电压;ia、ib、ic为定子相绕组电流;ea、eb、ec为定子相绕组反电势;L为每相绕组的自感;r为每相绕组的内阻;M为每两相绕组的互感。
因为转子磁阻不随转子的方位改变,因而定子绕组的自感和互感为常数。当选用Y形联合时,ia+ib+ic=0,因而有:
3.无刷直流电机模型规划
在Matlab R2012的Simulink环境下,使用SimPowerSystem Toolbox 5.6丰厚的模块库,在剖析BLDCM数学模型的基础上,树立$BLDCM操控体系仿真模型,体系规划框图如图2所示。

如图2所示,BLDCM操控体系选用双闭环操控:速度环选用PI操控,电流环选用电流滞环比较器。将图2所示操控体系分割成各个独立的子模块,其间首要包含:
BLDCM本体模块、参阅电流模块、电流滞环操控模块、电压逆变模块、速度操控模块、转矩核算模块。将各个模块进行有机的整合,即可树立BLDCM操控体系的仿真模型,如图3所示。

3.1 BLDCM本体模块
在整个操控体系中,BLDCM本体模块是最重要的部分,该模块依据BLDCM电压平衡方程式(2)求取BLDCM三相相电流,操控框图如图4所示,由电压平衡方程式(2)可得,要取得三相相电流ia、ib、ic,必需首要求得三相反电动势ea、eb、ec.在BLDCM建模进程中,取得抱负的梯形波反电动势波形是一个要害的问题。现在求取反电动势常用的办法有:(1)有限元法;(2)傅里叶改换法;(3)分段线性法,如图5所示,将一个运转周期分为6个阶段,每60°为一个换相阶段,每一相的每个运转阶段都可用一段直线来标明,依据某一时间转子方位和转速信号,确认该时间各相所在的运转状况,经过直线方程即可求得反电动势波形。分段线性法简略易行,且精度较高,可以较好的满意仿真建模的规划要求。因而选用分段线性法树立梯形波反电动势波形。

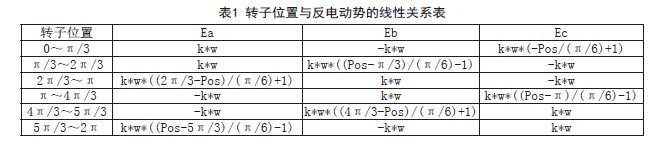
依据图5可以推得转子方位和反电动势之间的线性联系,如表1所示,然后选用分段线性法,处理了在BLDCM本体模块中梯形波反电动势的求取问题。
3.2 电流滞环操控模块
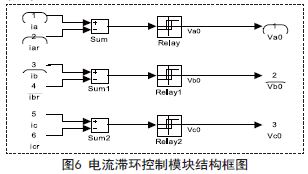
$电流滞环操控模块的效果是完成滞环电流操控,输入三相参阅电流以及三相实践电流,输出为逆变器操控信号,模块结构框图如图6所示。将实践电流和参阅电流之间的误差与滞环比较器的环宽进行比较,对应相导通或关断。挑选恰当的滞环比较器环宽,即可使实践电流波形不断盯梢参阅电流的波形,完成电流闭环操控。
k为系数,Pos为方位信号,w为转速信号。
[page]
3.3 速度操控模块
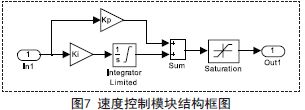
速度操控模块为单输入:参阅转速与实践转速的差;单输出:三相参阅电流的幅值Is.其间,KP为份额参数,KI为积分参数,Saturation饱满限幅模块将输出的三项参阅电流的幅值限制在要求范围内,如图7所示。
3.4 参阅电流模块
参阅电流模块的效果是依据电流幅值信号Is和方位信号给出三相参阅电流,输出的三相参阅电流直接输入电流滞环操控模块,用于与实践电流进行电流滞环操控。参阅电流模块选用S-Function编程完成。
3.5 电压逆变模块
电压逆变模块完成的是逆变器的功用,输入为方位信号和电流滞环操控模块给出逆变操控信号,输出为三相端电压。
该模块可依据方位信号判别电机所在的运转阶段,给出相应的三相端电压信号,该模块选用S-Function编程完成。
4.仿真成果
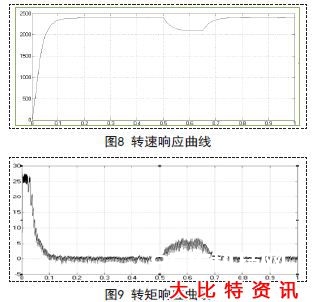
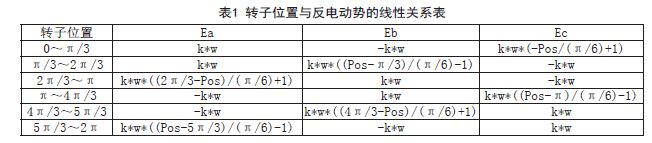
本文根据M a t l a b / S i m u l i n k树立了BLDCM操控体系的仿真模型,并对该模型进行了$BLDCM双闭环操控体系的仿真,仿真中BLDCM参数设置为:定子相绕组电阻R=1Ω,定子相绕组自感L=0.02H,互感M=-0.0061H,转动惯量J=0.005kg.m2,额外转速n=2400r/min,极对数p=1,额外电压220V.为了验证所规划的BLDCM操控体系仿真模型的静、动态功用,体系空载起动,进入稳态后,在t=0.5s时突加负载TL=5Nm,在t=0.65s时撤去负载,可得到体系转速、转矩、三相相电流和三相反电动势仿真曲线如图8-11所示。


由仿真波形可以看出,在n=2400r/m i n的参阅转速下,体系呼应快速且平稳,相电流和反电动势波形较抱负。图9、1 0标明:起动阶段体系坚持转矩稳定,没有形成较大的转矩和相电流冲击,阐明参阅电流的限幅效果有用;空载稳速运转时,疏忽体系的冲突转矩,此刻的电磁转矩均值为零;在t=0.5s时突加负载,转速产生突降,但又能敏捷康复到平衡状况,稳态运转时无静差。仿真成果标明了本文提出的这种$无刷直流电机操控体系的规划方案具有有用性及操控体系的合理性。
5.定论
本文在剖析BLDCM数学模型的基础上,在Matlab/Simulink仿真环境下,结合独立的功用模块与S-Function模块,提出了无刷直流电机操控系统规划方案。仿真成果标明:波形契合理论剖析,体系具有较好的动、静态特性,可以平稳运转,实用性强。






