


拉压力传感器内部结构
微型S梁拉压力传感器原理结构:
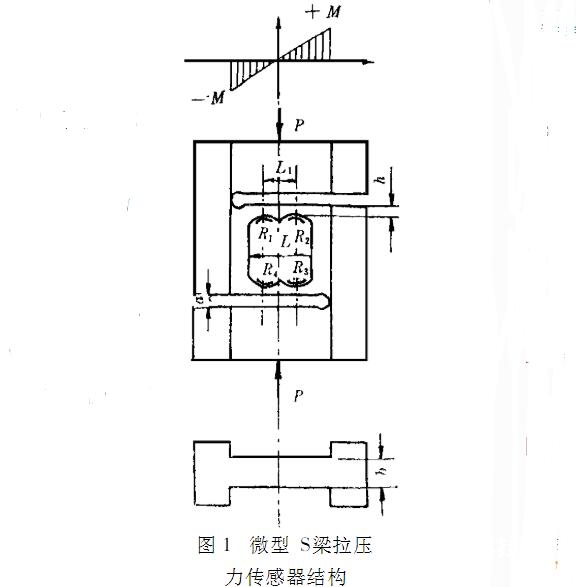
传感器原理结构依据骨外固定力丈量的特色,选用工艺老练、对丈量电路要求较低的电阻应变式力传感器。该传感器要害元件之–的弹性体,选用S型梁式结构,如图1所示。当受压力P时,从弹性体中心开孔处上侧梁的弯矩图可看出,沿X轴方向弯矩有负到正的改变,而开孔处下侧梁的弯矩则相反。挑选适合的贴片方位及组桥办法,不仅能抵消侧向力输出,力效果点的改变也不影响丈量成果,这正是骨外力丈量所有必要的。传感器弹性体的规划,主要是灵敏部分长度|、厚度h、宽度b和刚接部位的刚度的挑选。既要传感器体积小、线性好及适合的灵敏度,还要使刚接部位刚度足够大,在力P效果下不发生自在滚动。
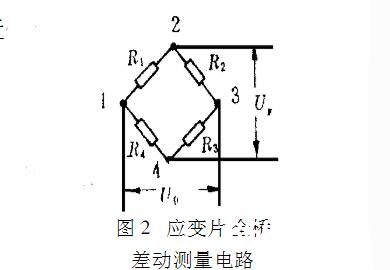
此刻最大弯矩微型S梁拉压力传感器结构生自在滚动。此刻最大弯矩[2]Mmax=PI2最大应力在弹性体中部长方孔的弧顶,即图1中电阻应变片R1、R2、R3、R4的张贴处,则最大应力emax=MW=3Pl1bh2(1)最大应变Xmax=emaxE=3Pl1Ebh2(2)四个应变片组满足桥差动电路,如图2所示。传感器弹性体资料选用硬铝合金,其弹性模量E=70x103N/mm2。将有关尺度代入(2)式,得到10N时R1处应变X=54×10-6。
拉压力传感器的原理
首要,在拉压力传感器作业过程中咱们会见到的目标有线性度、灵敏度、迟滞、重复性与漂移这五个。线性度所描绘的是传感器输入/输出的实践函数与其拟合直线之间的违背程度,其数值为两者之间的最大误差与满量程输出值的比值。灵敏度比较好了解,是指输出量的增加值(即增量)与引起该增加值的相应变量的增加量的比值,也是一个用来描绘传感器特性的重要目标。 迟滞是指在输入量由大到小改变,或由小变大改变时,形成两者特性曲线不相符的差值。重复性则指的是传感器同一方向改变的输入量,在屡次实验中特性曲线的不同程度。最终一个漂移,描绘的则是坚持输入不变,输出量会跟着时刻有所动摇的现象。
拉压力传感器经过力敏器材检测其所遭到的力的改变,并经过拉力传递结构来传递力的物理信号。 也就是说,弹性体在发生弹性形变时,使传递器这一转化元件(一般为电阻应变片)也发生形变,而此刻电阻应变片的阻值将发生改变,这种改变将转变为电信号被输出。
以数显电子秤为例,它的电路中包含了一个丈量电路,与信号扩大电路,丈量电路能将电阻的阻值变量转化成电压信号,而这种信号往往是弱电信号,并不能直观、精确地反应出改变的巨细。 经过扩大电路,这种信号即可被扩大并输出数显面板表。






