


其实提到ADAS,咱们首要想到的比方ACC(自适应巡航)、LDW(车道违背预警)、LKA(车道坚持)、FCW(前车磕碰预警)。这些技能现已老练,产品也现已量产,在近几年的高端车辆上都有装备。而且这些技能都和摄像头、毫米波雷达以及车身控制器有关,形似和地图并没有多大联系。实际上假如结合了地图,这些功用会变得更强壮。下面咱们来举几个比方。
ACC实际上是由驾驶员设置一个最高的巡航速度,车上由前置的传感器,如摄像头或毫米波雷达来承认车辆正前方的可通行区域内是否有车辆。假如有车辆,则在安全制动间隔内跟车,假如没有车辆,则加快到设置的巡航速度。留意这儿要特别强调“车辆正前方”,也便是车头的直线方向。假如是在直线行进,或许路途曲率简直能够视为直线的情况下,这种自适应巡航的功用是很棒的。
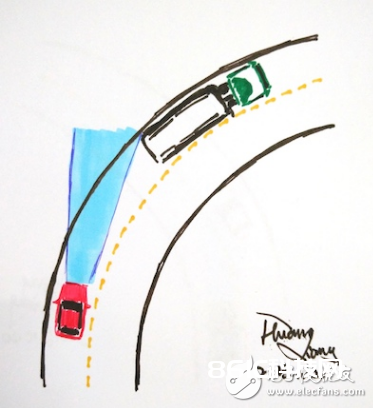
但是假如在弯道中,如下图,左边车道中的车辆的传感器会过错的以为右方车道的车辆在自己前方,所以当即减速。可实际上车辆完全能够坚持正常速度过弯。

亦或许,如下图中,左边车道的车辆根本就发觉不到自己车道内前方转弯处有一辆车,或许车辆跟上去的时分,或许前车忽然紧迫刹车时,现已来不及减速,继而就容易发生事端了。
除此以外,地图能供给路途的曲率,车辆在过弯道的时分能够提早减速,确保安全。或许在弯道的时分,摄像头的辨认也能够针对性的改换辨认模式,以提高弯道的车道线或交通参加物的检测准确性。地图也能够奉告车辆何时会进入以及脱离地道,相应的摄像头能够及时调整曝光率,然后确保感知的连续性。
夜晚行车的时分,车辆也能够依据地图供给的曲率信息,在弯道处自动的左右调整车灯的照耀视点,也能够依据地图供给的斜度信息,上下调整车灯的照耀视点。
另一方面,现在许多摄像头辨认的供给商经过摄像头来辨认路途上的限速牌,来抵达限速的功用,而其实地图却能够供给更好的服务。比方地图不只能够告知车辆在该路段上的限速,还能够在易发风险的路段,桥梁,地道,上下匝道的时分都能够供给引荐的车速。不只如此,还能够细化到各个车道的引荐车速。这儿还需求强调下,在自动安全及自动驾驶的情况下,引荐的行进速度比路途的限速更具有实用价值。
根据斜度数据,车辆在上坡前能够加油门,然后恰当的加快,而当抵达坡顶的时分减小油门,下坡的时分不加油。大陆公司做的电子地平线(Electronic Horizon)便是根据以上完结的,听说能节能达3%,该功用在商用车以及物流公司节省日常运营本钱上的含义就更为杰出。
也有较为初级的自动驾驶能够根据地图来完结。例如在高速公路自动驾驶场景上,直线行进的时分或许说在车道内行进的时分,车辆靠ADAS的主要功用完结,也便是ACC+LKA+FCW。在需求变道的时分,这个变道的指令能够是人工打个转向灯,也能够是自动驾驶体系自己决议计划的变道。
此刻由地图供给的车线信息来承认当时车辆的区域是否能够变道。假如是要下匝道,地图能够提早一个很远的间隔告诉车辆前方有匝道口,此刻车辆有满足的时刻,借用地图数据先渐渐靠到最右侧车道,准备下匝道。而假如不下匝道,或许有汇入车流的当地,车流也能够有满足的时刻先靠到最左边的超车车道中,以确保行车的安全。
所以ADAS结合高精度地图,将大大改进自动驾驶的才能。






