


网上老友大侠画了一个计数器的电路图让我帮助写个软件,抽暇写了一个。他做好了电路我就把程序给他烧写试验,略微修正后到达他的要求。
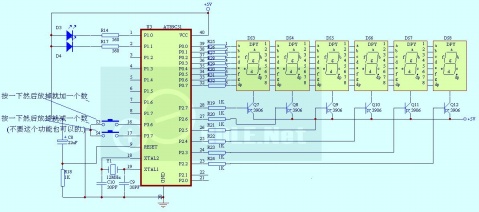
图中能够看到本制造的首要中心电路是用AT89C51组成的按键取值电路,S3S4别离操控计数值的加减。数码管运用的是共阳极经过3906操控。
这个计数器首要用于对键的按键次数计数,用于鼠标中的微按钮或其它按钮做QC测试用。所以在软件中用了取两次守时中止的键值做比较以到达简略防颤动和取健值的意图。读者朋友能够自行修正程序以合适自己的电路。本计数器的计数规模为0-999999,最大的频率为50Hz,当然这些参数都能够根据需求调整。程序运用的是汇编延时程序,能够改用C写,没有任何关系仅仅我偷闲从旧的程序中拷过来用。

#include
#define Key_UP P3_6 //上调
#define Key_DOWN P3_7 //下调
#define LED P0
#define LED1 P2_2 //LED操控
#define LED2 P2_3 //LED操控
#define LED3 P2_4 //LED操控
#define LED4 P2_5 //LED操控
#define LED5 P2_6 //LED操控
#define LED6 P2_7 //LED操控
unsigned char code LEDDis[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};
//共阳0-9的LED笔划
static unsigned char bdata Key; //可位寻址的状况寄存器
sbit NewKeyUP = Key ^ 0;
sbit NewKeyDOWN = Key ^ 1;
sbit OldKeyUP = Key ^ 2;
sbit OldKeyDOWN = Key ^ 3;
static unsigned long data Count;
static unsigned char LEDN[6];
void main(void)
{
void Delay_510(void);
Count = 0; //初始化变量
Key = 0;
EA = 1; //答应CPU中止
ET0 = 1; //守时器0中止翻开
TMOD = 0x1; //设守时器0为形式1,16位形式
TH0=0xB1;
TL0=0xDF; //设守时值为20000us(20ms)
TR0 = 1; //开端守时
while(1);
}
//守时器0中止外理中键扫描和显现
void KeyAndDis_Time0(void) interrupt 1 using 2
{
TH0=0xB1;
TL0=0xDF; //设守时值为20000us(20ms)
NewKeyUP = Key_UP; //取新的键值
NewKeyDOWN = Key_DOWN;
if (!OldKeyUP && NewKeyUP) //键铺开时,这儿的中止为20ms左右(守时值非主动装载所以多于20ms)
Count++;
if (!OldKeyDOWN && NewKeyDOWN)
Count–; //这儿Conut为int 没有做负数等处理,有需求自行加上
if (Count>999999)
Count = 999999;
LEDN[5]=Count/100000;
LEDN[4] = (Count-100000*(long)LEDN[5])/10000;
LEDN[3] = (Count-100000*(long)LEDN[5]-10000*(long)LEDN[4])/1000;
LEDN[2] = (Count-100000*(long)LEDN[5]-10000*(long)LEDN[4]-1000*(long)LEDN[3])/100;
LEDN[1] = (Count-100000*(long)LEDN[5]-10000*(long)LEDN[4]-1000*(long)LEDN[3]-100*(long)LEDN[2])/10;
LEDN[0] = (Count-100000*(long)LEDN[5]-10000*(long)LEDN[4]-1000*(long)LEDN[3]-100*(long)LEDN[2]-10*(long)LEDN[1]);
LED=LEDDis[LEDN[5]];
LED6 = 0;
Delay_510();
LED6 = 1;
LED=LEDDis[LEDN[4]];
LED5 = 0;
Delay_510();
LED5 = 1;
LED=LEDDis[LEDN[3]];
LED4 = 0;
Delay_510();
LED4 = 1;
LED=LEDDis[LEDN[2]];
LED3 = 0;
Delay_510();
LED3 = 1;
LED=LEDDis[LEDN[1]];
LED2 = 0;
Delay_510();
LED2 = 1;
LED=LEDDis[LEDN[0]];
LED1 = 0;
Delay_510();
LED1 = 1;
OldKeyUP = NewKeyUP;
OldKeyDOWN = NewKeyDOWN;
}
void Delay_510(void) //延时510微秒
{
#pragma asm
MOV R0,#7DH
MOV R1,#02H
TSR1:
DJNZ R0,TSR1
MOV R0,#7DH
DJNZ R1,TSR1
#pragma endasm
}






