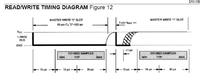
留意:不管写时隙,仍是读时隙,都以主机驱动数据线(DQ)为低电平开端。数据线的下降沿触发从机内部的延时电路,使之与主机获得同步!!留意主从机采样时刻!
复位脉冲

一开端过错出现在复位脉冲。
while(PIND&0x01); //正确!!等候被拉低。。18B20拉低60-240 us
我写出这姿态//while((PIND&0x01)==0);
XXXXXXXXXXX这样写是过错的XXXXXXXXXXXXXX
//读出来的是255(0xff)
/////////////////
// 8Mhz晶振
//////////////////
#include
#include “1602.c”
#define uchar unsigned char
#define uint unsigned int
#define DQ_L PORTD&=~(1)
#define DQ_H PORTD|=(1)
#define DQ_IN DDRD&=~(1)
#define DQ_OUT DDRD|=(1)
void delay_us(uint n)
{
uint t;
for(t=0;t
}
void delay_ms(uint n)
{
uint i,j;
for(i=0;i
}
void reset(void)
{
DQ_OUT;
DQ_H;
DQ_L;
delay_us(680); //大约480-960us
DQ_H;
DQ_IN;
delay_us(20); //等候15-60us
while(PIND&0x01); //等候被拉低。。18B20拉低60-240 us
//while((PIND&0x01)==0);XXXXXXXXXXX这样写是过错的XXXXXXXXXXXXXX
//读出来的是255(0xff)
DQ_OUT;
DQ_H;
delay_us(300); //等候180-400us
}
void write(uchar d) //先发低位
{
uchar i;
DQ_OUT;
for(i=0;i<8;i++)
{
DQ_L;
asm(“nop”);
asm(“nop”);
asm(“nop”);
if(d&(1<
DQ_H;
delay_us(80);
}
else
{
DQ_L;
delay_us(80);
}
DQ_H;
}
}
uchar read() //低位在先
{
uchar i,d=0;
for(i=0;i<8;i++)
{
DQ_L; //高到低跳变
asm(“nop”);
asm(“nop”);
asm(“nop”);
DQ_H;
DQ_IN;
if(PIND&0x01)
d|=(1<
d&=~(1<
}
return d;
}
uchar gettemp()
{
uchar t1,t2;
uchar te;
reset();
write(0xcc); //越过rom
write(0x44); //开端转化
delay_ms(800); //延时800ms
reset();
write(0xcc); ////越过rom
write(0xbe); //宣布读指令
t1=read(); //低字节
t2=read();
te=(t1>>4)+(t2<<4);
return te;
}
int main()
{
uchar i,tt;
uchar temp[4];
init_1602();
while(1)
{
tt=gettemp();
//tt=0XFE;
temp[0]=tt/100+0;
temp[1]=tt%100/10+0;
temp[2]=tt%10+0;
temp[3]=0;
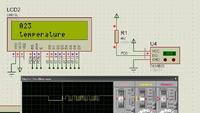
LCD_write_string(1,1,”temperature”);
LCD_write_string(1,0,temp);
}
}
RESET AND PRESENCE PULSES

READ/WRITE TIME SLOTS