


摘要:为了合作飞翔操控体系的规划和开发,本文规划了一种依据线性化直升机数学模型的半物理仿真体系。要点叙述了仿真体系的体系结构以及各个组成部分的功用,描绘了线性化直升机仿真模型的基本原理和完成进程,并以航线飞翔为例给出了仿真进程和仿真成果。实际使用标明,本体系具有结构简略、仿真精确、可靠性高的特色,到达了规划要求。
关键词:无人直升机;线性化模型;数学模型;仿真体系;半物理仿真
飞翔操控体系决议了无人直升机的飞翔功用,跟着无人直升机功用的不断提高及功用的日益添加,飞翔操控体系越来越杂乱。某型半物理仿真体系是为合作飞翔操控体系规划而开发的,首要为直升机飞翔动力学模型的验证与评价、飞翔操控软件的规划与验证等供给强有力的技能支撑渠道。这关于提高飞翔操控体系规划的功率、削减规划差错、缩短规划周期及下降规划本钱具有重要意义。
1 仿真体系功用
某型半物理仿真体系的首要功用包含:
1)模仿无人直升机从起飞到下降整个飞翔进程的全状况,进行全包线仿真;
2)评价验证直升机飞翔动力学模型的精确性;
3)模仿无人直升机各个传感体系的报文和动态特性;
4)可接入飞翔操控核算机什物、舵机体系和地上站什物(除掉电台部分),进行半物理仿真实验。
2 仿真体系结构
依据无人直升机仿真模型获取方法不同,某型半物理仿真体系如图1、图2所示,形成了两种半物理仿真体系结构。
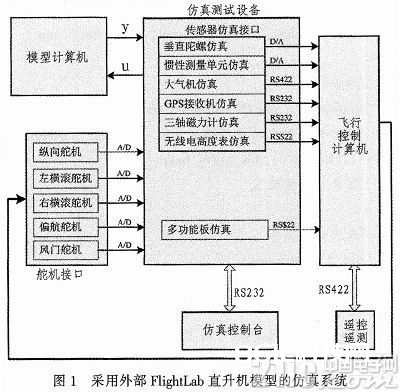
2.1 选用外部模型机的FlightLab直升机模型
如图1所示,该仿真体系由仿真测验设备、模型核算机、舵回路和飞控核算机等组成。其间,与仿真测验设备相合作的还有仿真操控台,与飞控核算机相合作的还有地上站测控软件。
1)仿真测验设备:运转仿真软件,其间首要包含传感器信息模仿软件、舵机信息模仿软件、多功用板信息模仿软件。各个模仿软件之间选用同享内存的方法进行信息交互。首要功用包含:①舵控指令接纳解算并转换成4个操作量作为模型输入信息;②直升机模型接纳操作指令,解算得到飞翔状况信息作为传感器输入数据信息;③模仿传感体系的报文和动态特性;④和飞控核算机之间进行网络通信;⑤和模型机之间进行网络通信。
2)模型核算机:运转无人直升机FlightLab仿真模型;接纳操控输入,并解算得到无人直升机实时状况数据。
3)舵回路:舵机可接什物舵机,也可直接经过仿真测验设备中的舵机信息模仿软件进行模仿。
4)飞控核算机:运转飞翔操控软件,接纳传感器状况信息以及遥控信息,依据无人直升机当时的飞翔状况以及操作指令解算得到舵机操控指令。
5)仿真操控台:运转仿真界面程序,可接受用户界面输入信息,首要完成模型状况量的曲线显现功用,以及各种传感器毛病类型仿真、模型运转与重载操控等功用。
6)地上测控核算机:运转地上测控软件,用于对飞翔操控核算机发送遥控指令,操控无人直升机的飞翔模态,并接纳飞翔操控核算机的下行数据,显现、记载无人直升机飞翔进程和使命设备运转状况。
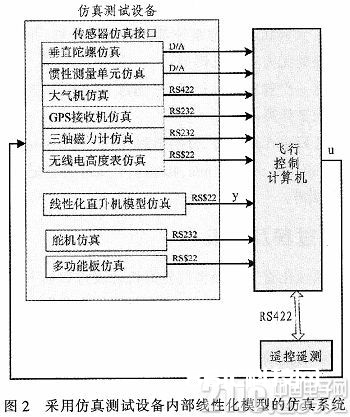
2.2 选用仿真测验设备内部的线性化模型
如图2所示,该仿真体系由仿真测验设备、飞控核算机和地上站测控软件等组成。其间,仿真测验设备中除了运转传感器信息模仿软件、舵机信息模仿软件、多功用板信息模仿软件,还将运转线性化直升机数学模型模仿软件。比较于2.1节所述的半物理仿真体系,该体系渠道建立简略且带着便利。可是,遭到线性化直升机数学模型的精度约束,该体系仅适用于对仿真精度不高的状况。
3 线性化直升机模型
当进行飞控软件逻辑仿真或许其他对模型精度要求不高的仿真时,常选用仿真机内部的直升机线性模型。其首要优势在于便于快速建立仿真渠道,易于带着(不需要再带着模型机),特别是大大便利在外场调试进程中的仿真作业。
线性化直升机模型首要完成以下功用:接纳飞控核算机解算出的操控输入数据;实时运转仿真模型;终究将模型解算得到直升机的相关状况数据反馈给飞控核算机。线性化直升机模型仿真模块的输入输出联系如图3所示。
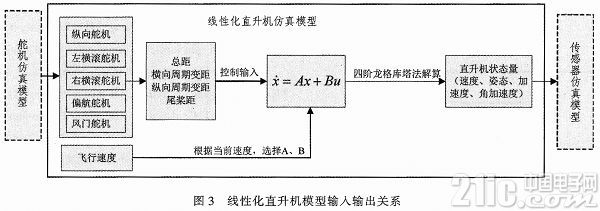
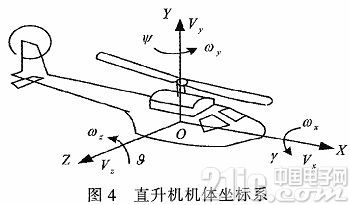
被控目标数学模型建立于机体坐标系,如图4所示。
选用状况空间表达式方式描绘,给定被控目标的数学模型为:
其间,状况x=[Vx Vy Vz ωx ωy ωz γ ψ θ]T,别离标明直升机纵向速度、垂向速度、横向速度、滚转角速度、偏航角速度、俯仰角速度、滚转角、偏航角和俯仰角;操控输入u=[φ7A1 B1 φT]T,别离标明旋翼总距、横向周期变距、纵向周期变距和尾桨总距。
状况矩阵A和操控矩阵B经过FlightLah核算得到,且跟着无人直升机飞翔状况的不同而改动。详细核算进程如下:
1)在FlightLab开发环境下,别离对主旋翼、尾桨、机身、平尾、垂尾、发动机和飞控体系等部件进行建模,并终究综组成一个完好的无人直升机模型;
2)给定一个安稳的飞翔状况,经过FlightLab进行模型的线性化和配平核算;
3)经过FlightLab核算,别离得到0m/s、3m/s、9m/s、15 m/s、20 m/s、25m/s、30 m/s、35 m/s、40 m/s、45 m/s等安稳飞翔状况下的A、B矩阵。
4 仿真进程及成果
依据线性化直升机模型的直升机仿真进程如下:
1)发动各个传感器、舵机、多功用板仿真程序;
2)发动线性化直升机模型仿真程序:
3)发动飞翔操控软件程序;
4)经过测控软件,发送飞翔操控指令,开端飞翔仿真;
5)经过测控软件,显现、记载仿真进程参数;
6)对飞翔仿真成果进行参数剖析。
以航线飞翔仿真为例,其仿真成果如图5~7所示。
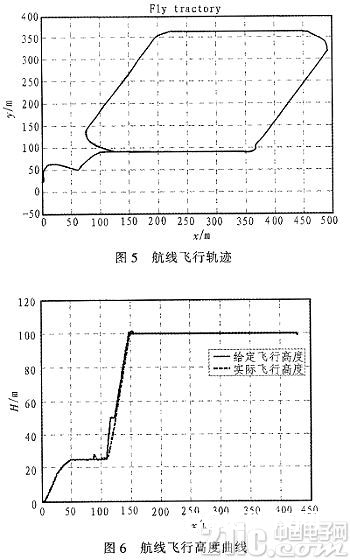
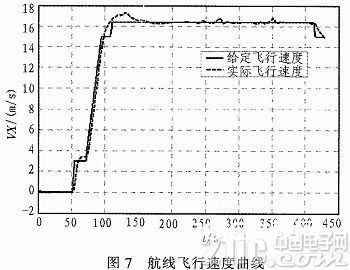
由仿真曲线可知,航线飞翔高度100 m,高度操控精度能到达飞翔高度的3%,飞翔速度16 m/s,速度稳态操控精度能到达±1 m/s。
5 定论
该仿真体系的建立为无人直升机规划和操控战略的研讨供给了实验渠道,且便利带着和实际使用操作。实践标明,这套仿真体系能够十分有效地验证飞翔操控体系的操控逻辑,直观地验证飞翔操控体系操控作用的好坏,为飞控体系的优化规划和体系的功用评价等供给数据支撑,具有了较好的工程使用价值。






