


摘要:为了在高温、有毒等特定环境下进行视频图画数据、气体参数等环境状况的检测,本文规划一种根据单片机的可实时视频同传的勘探小车。Windows监控端经过DB120无线路由器与单片机STC89C52操控中心通讯,发送操控信号给电机驱动模块L298N、LED模块,完成小车转向、进退及灯火的操控;摄像头模块、温度传感器模块进行视频数据、温度数据的收集,并实时回传给Windows监控端。
导言
跟着自动化技能的开展,智能操控广泛运用在军事、科研、民用范畴。无线勘探小车集成了电子、机械、通讯、传感器、计算机软硬件、人工智能及自动操控等多方面的技能。此外,其成本低、体积小、操作简略,能较好地运用在勘探、环境监测等运用。本文旨在规划一种能在高温、有毒等特定环境下,进行远距离无线遥控以及摄像、测温勘探的单片机小车操控体系。
1 体系整体方案规划
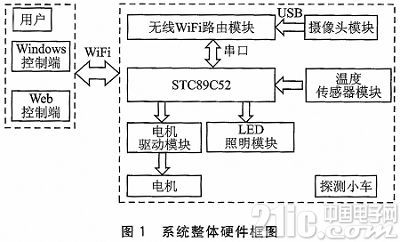
本项目规划的是集单片机操控模块、摄像模块、温度传感器模块、照明模块及路由模块为一体,可实时视频传输及环境勘探的勘探小车,其体系硬件结构框图如图1 所示。勘探小车以单片机芯片STC89C52为操控中心,电机驱动模块L298N进行小车直流电机的驱动操控,温度传感器进行外部环境的检测,摄像头模块进行视频图画的收集,LED模块进行照明,并经过无线WiFi路由模块完成Windows操控端与小车的无线通讯。
2 硬件规划及选型
硬件部分首要选用市场上比较盛行、稳定性高且性价比高的模块,此外,大部分模块都拼装简略、晋级便利、可移植性强,便于项目的开发及后续晋级保护。例如,摄像头可经过USB接口直接连到路由器上,无需单片机转发,简化了视频流的传输。
2.1 电机驱动模块
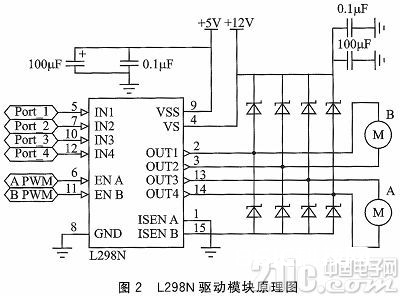
电机驱动模块选用L298N,可接纳规范的TTL逻辑电平信号,可驱动46 V/2A以下的电机。其驱动模块原理图如图2所示,L298N输入电压是12V,L298N的OUT1、OUT2和OUT3、OUT4之间别离接2个电机,本项目可直接运用单片机的I/O输进口Port1~Port4,APWM、B PWM改动L298N的IN1、IN2、IN3、IN4引脚及ENA、ENB使能端,然后别离完成操控电机的正回转及中止功用。
2.2 无线WiFi路由模块
无线WiFi路由模块选用的是DB120路由器,此路由器是OpenWRT体系,刷机晋级非常简略。本项目能够经过网络下载,在同一网段内经过浏览器登录192.168.1.1,挑选“0829-openwrt-rc6-RG100A_DB120-squashfs-cfe.bin”版别的固件进行烧录。固化后,该路由模块可作为转发站,完成USB摄像头的加载及与单片机的串行通讯。
2. 3 摄像头模块
本项目选用中星微301主控芯片的USB摄像头模块,经过简略的路由设置就能快速完成摄像头的挂载。挂载成功后,可经过路由器的WiFi转发摄像头的动态视频至Windows操控端。
2.4 温度传感器模块
本项目选用DALLAS公司出产DS18B20的一线式温度传感器,进行外部环境数据的监测,其线路简略,仅有GND、DQ、VDD三个引脚。其间,DQ为数字信号输入/输出端,GND为电源地,VDD为外接供电电源输入端。
3 软件规划
本项目中,用户监控端与勘探小车经过WiFi路由进行数据传输,因而,开发人员在软件规划与完成过程中需要对小车进行操控编程、监控视频动态显现、操控界面GUI规划及网络编程(Socket编程)。
项目开发过程中,选用Keil C51开发环境,对勘探小车进行软件编程,完成对外部环境的测温及小车电机的操控;选用编程简略灵敏、可移植性强的QT开发环境,进行Wind ows操控端的GUI规划、Socket编程及视频动态显现。此外,还选用了单片机多功用调试帮手软件、TCPUDP—Debug软件进行单片机的通讯测验。
3.1 小车电机操控编程
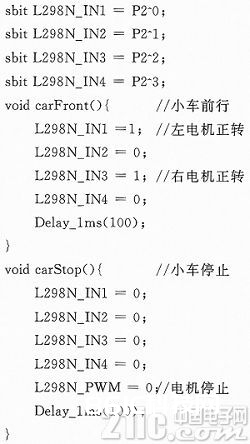
进行电机驱动模块L298N的电路连线,Port1~Port4别离为P2^0~P2^3,查阅L298N的数据手册,对照其逻辑功用表在Keil C51下进行电机行进、撤退、左转、右转和中止的编程。编程样例如下所示:
3.2 Socket编程
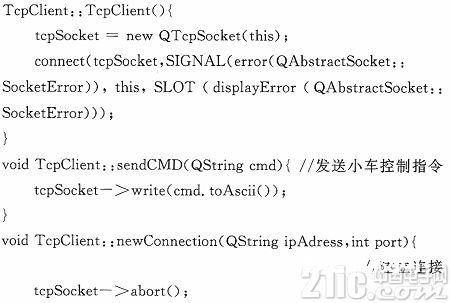
勘探小车与路由器通讯中,首要用到了QTcpSocket客户端和QTcpServer服务器,其间本项目进行监控端Socket编程。依照通讯的交互时序,先创立TcpSocket类,然后树立衔接。其要害代码如下:
3.3 监控端GUI规划及视频动态显现
进行监控端界面规划时,需考虑到整个界面的布局及易操作性。本项目选用WebView控件进行视频的显现;ButtonBox控件作为前后左右等按钮开关;Label控件显现温度值、时刻和标题;LineEdit控件作为IP和端口号输入端。
因为WebView控件只能加载路由转发的静态图画,因而,为了完成监控端实时视频动态显现,除了进行IP地址及端口号绑定设置外,还需要多加一个定时器来动态改写。以下为要害代码:
3.4 试验成果
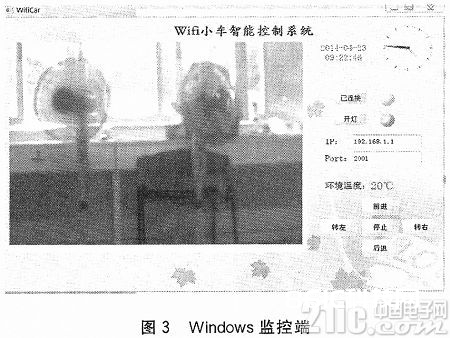
经过软硬件规划、编程调试及后期功用测验,勘探小车体系能较好地完成小车操控、外部环境监测、视频实时动态显现、LED照明等功用,整个操控过程中,可操作性较强体系启动后,用户只需进行IP及端口的绑定设置,然后单击“衔接”按钮;衔接成功后,该按钮将变成“已衔接”状况且右边的赤色标识变成绿色,此刻,经过监控端上的按钮,用户可对小车进行前后左右的操控、开关LED灯、获取实时视频图画及外部环境温度。Windows监控端如图3所示。
结语
根据WiFi的实时视频同传的勘探小车是一个集单片机、路由器、摄像头、QT等各种软硬件于一体的智能化勘探小车体系。本体系仅仅一个根底渠道,包含小车行走操控、灯火操控、测温、实时视频传输、数据回传功用,其软硬件规划简练,开发成本低。在往后的研讨中,针对不同的运用及环境特性,项目研制人员能够在此根底上添加相关模块功用,如云台舵机、机械手臂、气体检测传感器模块,可对外部环境完成全方位的视频监控、危险物品拾取、有毒气体的预警等。






