


摘要:本文选用STM32F103RBT6芯片规划并完结了一款小型化桌面型的贴片机。首要介绍了贴片机的结构及各个模块的组成,剖析了其间运动操控体系模块的硬件组成、软件规划计划,对中心电路部分、舵机的驱动程序以及串口通讯数据包的规划做了具体的介绍。通过调试,该规划计划能够较为精确和高效的完结自动贴片作业。
贴片机又称“外表贴装体系”(Surface Mount System),是一种通过移动、汲取、安放动作把表贴元件精准放置在指定方位的一种自动化设备。在实践生产线中,先由点胶机对PCB板进行点胶操作,然后由贴片机进行贴装操作,最终由回流焊机焊接,完结整个PCB板的焊接使命,是SMT流水线中不可或缺的一环。现在发达国家垄断了贴片机的首要范畴,我国的贴片机工业彻底靠进口。并且在实践生产中,国际上的自动贴片机尽管功率与精度最高,但大都造价贵重,功用单一,适用于大型企业。而手动贴片机造价低价,但功率极低,精度取决于操作者得水平,且无法解放双手。
本文以STM32F103RBT6为主控芯片,规划了一种适应于个体经营者、校园试验以及科研发板等范畴的自动贴片机,既能解放双手,添加功率,又能不失精度,价格适中。
1 贴片机模块规划计划
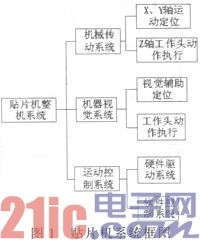
本文将贴片机模块化的进行规划与编程,模块化后的整机体系由3个部分组成:机械传动体系、机器视觉体系和运动操控体系,如图1所示。
1.1 贴片机机械传动体系的规划计划
1.1.1 贴片机X轴Y轴规划计划
本计划选用X—Y轴两轴联动,Z轴独立运动的规划计划。其间X-Y轴由步进电机通过同步带传动进行机械运动。具体完结结构如图2所示。

如图所示,Y轴步进电机固定于底座上,带动同步带轮旋转,同步轮带动同步带做直线运动,光轴滑块与同步带相连。然后跟从同步带演光轴导轨做Y轴方向的的运动。X轴全体组织与Y轴类似,供给X轴方向上的直线运动。其全体固定与Y轴滑块之上,当Y轴运动时一同带动X轴运动。然后完结X—Y两轴联动。
1.1.2 贴片机Z轴规划计划
本规划计划中Z轴由舵机、光轴导轨、吸笔、拖拽针、摄像头组成。其结构如图3所示。

其间吸笔由空心轴步进电机制造而成,当步进电机旋转时,带动吸笔吸盘挑选,然后供给了贴片机旋转轴的运动。旋转吸笔用于改动元器材贴装方向。拖拽针与吸笔固定在同一直线上,用于拖拽料盘,然后完结送料功用。拖拽针与吸笔别离固定在2组光轴导轨上,底部装置有绷簧,用于拖拽针与吸笔复位。舵机操控压杆左右旋转,然后压动吸笔与拖拽针进行向下运动,当压杆处于中心态时,绷簧将吸笔与拖拽针
弹起,回到初始方位。摄像头装置在作业台上方,用于仰望PCB板。
1.2 机器视觉体系规划计划
本计划选用两台CCD相机、环形LED光源及图画处理设备组成。其间一台CCD相机装置在贴片机Z轴上。与贴装头一同运动,用于仰望PCB板,收集各定位点坐标信息,核算X—Y轴运动偏移量,辅佐定位。别的一台CCD相机固定在作业台上,向上俯视。当贴装头汲取原件后,运动至相机上方,相机收集元器材图画。核算旋转视点偏移量及X—Y轴运动偏移量。环形LED光源供给相机收集图画时的背光,进步成像质量。核算机用于处理收集到的图画数据,剖析核算后将操控指令传送至运动操控体系。
1.3 运动操控体系规划计划
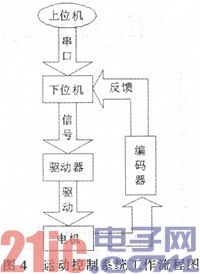
运动操控部分由软件体系与硬件设备组成。其间软件部分分为上位机及下位机。上位机即核算机。下位机选用STM32F103RBT6微操控器作为中心操控器。上位机与下位机由串口数据线衔接。硬件设备由步进电机、步进电机驱动器、舵机、电磁阀等组成。
运动操控体系作业流程如图4所示。
2 运动操控体系硬件规划
2.1 运动操控体系结构
贴片机操控体系模块所完结的首要使命是,在上层操控器的操控下,对步进电机驱动器进行操控,使各轴能够进行“受控运动”,完结运动操控体系所需求的各轴起制动、正回转、调速和维护等功用。
操控体系的操控形式是以PC机为渠道、以微操控器为中心和谐作业。通用PC机担任数控程序修正、人机界面办理等功用;微操控器用来办理子程序以及担任机械本体的运动操控和逻辑操控,支撑用户的开发和扩展,并具有上、下两级的开放性。
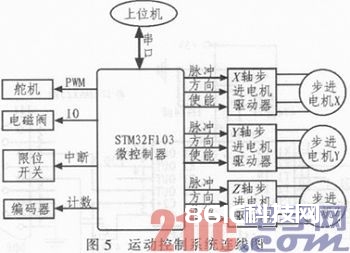
本规划计划选用STN32F103微操控器作为中心器材,和谐3个步进电机驱动器操控步进电机的运转。一同获取编码器数据,限位开关状况,并操控舵机、电磁阀等器材的运转。各器材衔接图如图5所示。
本规划计划所选用的主控芯片STM32F103RBT6是一款依据ARM Codex—M3内核的32位处理器,具有出色的功耗操控与很多外设。该芯片内置128K FLASH、20K SRAM、2个SPI、3个串口、1个USB、1个CAN、2个12位的ADC、RTC、51个可用IO口。其电路图如图6所示。
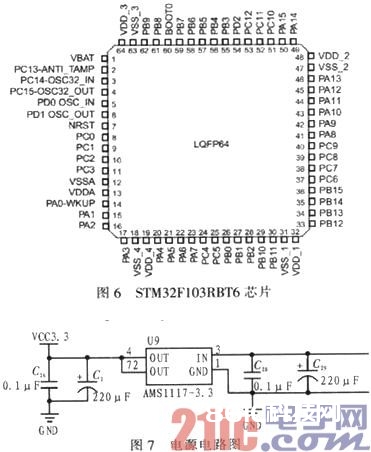
2.2 电源电路
电源电路选用AMS1117—3.3作为电压转化芯片。AMS1117是一款正电压输出低压差的三端线性稳压电路,在输出1 A电流时,输入输出的电压差典型值为1.8 V,内部集成过热维护和限流电路,确保芯片和电源体系的稳定性。
该电路输入端与输出端各接1个0.1μF的非极性独石电容和1个220μF的极性电容。这两组%&&&&&%起到了稳压滤波的效果。
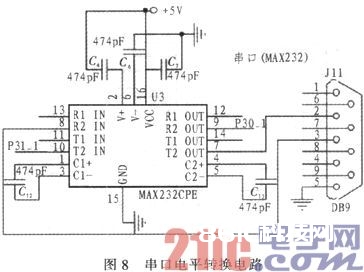
2.3 串口电平转化电路
串行接口是嵌入式体系中较为常用的一种接口。本体系选用RS-232总线于上位机进行通讯,选用MAX232芯片来完结RS-232串行接口的电平转化。串口通讯电路如图8所示。
2.4 步进电机驱动电路
步进电机必须有驱动器和操控器才干正常作业。驱动器的效果是对操控脉冲进行环形分配、功率放大,使步进电机绕组按必定次序通电,操控电机滚动。本规划选用DM442数字式步进电机驱动器。该驱动器能够设置512内的恣意细分以及额定电流内的恣意电流值,能够满意大多数场合的使用需求。电路连线如图9所示。
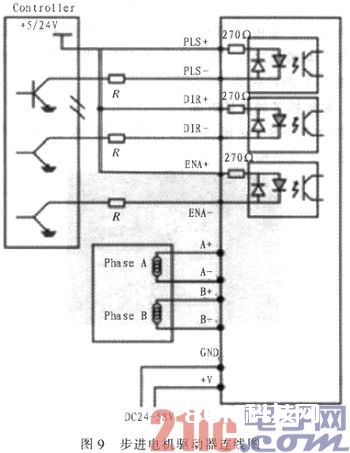
通过步进电机驱动器操控步进电机的办法较为简略,仅需通过单片机IO口给出不同频率的方波脉冲信号即可操控步进电机的速度,通过另一个IO口给出凹凸电平操控电机旋转方向。本文所选用的步进电机步距角为1.8°,因而驱动器每接纳200个脉冲信号,步进电机旋转一周。
3 运动操控体系软件规划
下位机操控程序由串口收发程序,限位开关检测程序,舵机驱动程序、步进电机驱动等部分组成。下面将对舵机驱动和串口收发部分做具体的介绍。
3.1 舵机驱动程序
依据1.1.2中的介绍,舵机用来操控吸笔和拖拽针的运动,在单片机的操控中常用PWM(Pulse Width Modulation)调制来驱动它。脉冲宽度调制(PWM)是使用微处理器的数字输出来对模仿电路进行操控的一种十分有用的技能,其优越性在于驱动电子设备的简略性和核算机接口的简单性。在舵机操控体系中,输出的PWM信号通过功率器材将所需的电流和能量传送到舵机线圈绕组中,来操控舵机的正回转。
STM32的定时器除了TIM6和TIM7,其他的定时器都能够用来发生PWM输出。其间高档定时器TIM1和TIM8能够一同发生多达7路的PWM输出。而通用定时器也能一同发生多达4路的PWM输出,这样,STM32最多能够一同发生30路PWM输出。由于只操控一个舵机,这儿咱们仅使用TIM3的CH2发生一路PWM输出。具体步骤如下:
1)敞开TIM3时钟,装备PA7为复用输出。
2)设置TIM3的ARR和PSC,操控输出PWM的周期。
3)设置TIM3_CH2的PWM形式。
4)使能TIM3的CH2输出,使能TIM3。
5)修正TIM3_CCR2来操控占空比。
由于舵机所需的操控信号标准周期是20毫秒,最低不得少于15毫秒。中位脉冲宽度是1.5毫秒,脉冲宽度在加减1.5毫秒之间内改变。可控规模一般都是0.5~2.5毫秒。即操控舵机运转至两个机械极限方位的信号周期为0.5~2.5毫秒,对应占空比为2.5%-12.5%。本计划中舵机需保持在3个状况,别离是左极限,右极限和中心方位。用于操控拖拽针下移,吸笔下移和复位。
因而,要操控舵机,首现需求一个频率为50赫兹的PWM波,然后调理其占空比为2.5%-12.5%。PWM输出频率的核算公式为:
这儿体系时钟频率为72000000赫兹,所需PWM频率为50赫兹。为便利核算,一同确保自动重装载值和预分频系数均为整数,这儿取自动重装载值为1000。核算得预分频系数为1440-1=1439。因而调用PWM初始化函数为:PWM_Init(1000,1439);
PWM输出波形占空比核算公式为:
由此核算得到:
左极限方位时TIM3->CCR2=25,
右极限方位时TIM3->CCR2=125,
中心方位时TIM3->CCR2=75。
3.2 串口通讯装备
STM32的串口资源适当丰厚的,最多可供给5路串口(STM32F103RBT6只要3个串口),有分数波特率发生器、支撑同步单线通讯和半双工单线通讯、支撑LIN、支撑调制解调器操作、智能卡协议和IrDA SIR ENDEC标准(仅串口3支撑)、具有DMA等。
STM32的串口装备需求敞开串口时钟,并设置相应IO口的形式,装备波特率、数据位长度、奇偶校验位等信息。STM32的串口波特率核算公式如下:
上式中,fPCLKx是给串口的时钟;USARTDIV是一个无符号定点数。
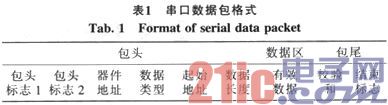
3.3 串口数据包格局规划
表1为串口与单片机通讯的数据包格局,每帧有9个字节,开端六个字节是包头标志、器材地址、数据类型、开始地址以及数据长度,其间数据类型有:读数据指令r(0x72)、预设参数w(0x77)、运动指令m(0x6D)、恳求重发指令c(0x63)、正常回来指令b(0x62)和扔掉通讯指q(0x71)。然后是10个字节的数据位,一般数据位为2个4字节的数据,为了防止呈现数据对齐问题,在后面参加两个值为0的字节。最终是两
个字节的校验位和完毕标志位,选用CRC16进行校验。
数据由上位机即PC自动发送,下位机即单片机被迫等候接纳,体系在每次上电初始化时进行一次握手,下位机在接纳到的包头数据中匹配自己的器材地址,共同时则接纳指令,否则将收到的数据包扔掉。当上层操控器向单片机发送读数据指令r(0x72)时,其数据位均为0;单片机收到指令后,将状况信息填入数据位,回发给上位机。当上位机向单片机发送预设参数w(0x77)数据包时,将参数信息填入相应数据位;单片机收到后,将数据写入EEPROM中并发送反应,反应帧以相同的类型、将存好的数据再次读出填入数据位,发送给上位机进行匹配校验。当上位机向单片机发送运动指令m(0x6D)时,将数据位按设定的格局填入数据位;单片机读取并依照指令内容进行运动。
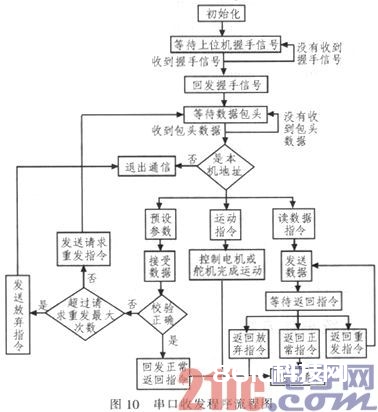
单片机正确接纳到除预设参数之外的数据时向主机回发正常回来指b(0x62);若收到上一组主机的数据后发现数据犯错,则恳求重发指令c(0x63),主机接纳到此回应指令后履行重发操作;若接连通讯过错并超越最大约束后则发送的扔掉指令q(0x71)。由于不触及有用数据,所以这三种指令的开始地址、数据长度、有用数据均为0。
4 完毕语
本文依据现在贴片机市场上的使用现状,提出了低成本,小型化的规划计划。对贴片机整机的机械结构进行了优化规划。别离对贴片机的机械传动体系,机器视觉体系及运动操控体系给出了规划思路。针对运动操控体系,规划了具体的硬件与软件完结计划,并对整机作业进程进行具体阐明。本文规划的贴片机运动操控程序通过调试,达到了预期方针,现已在校园试验室的使用中取得了不错的效果。
- STM32单片机中文官网
- STM32单片机官方开发工具
- STM32单片机参阅规划






