


进步现代化工厂部分之间物料转移和内部运送的协调性,是完成出产全盘主动化的重要行动。传统物料运送车具有设备杂乱、功耗大、出资高、污染环境等缺陷,其间有轨运送车需铺设专门轨迹,若出产程序改动,需从头铺设轨迹,损坏路面,出资高;无轨运送车包含叉车及手推运料小车,均需专人驾驭,劳动强度大,运送功率低。
本规划选用光电检测技能,以日本三菱公司出产的FX-2N可编程操控器为操控中心,经过编程完成智能操控。若出产工序改动,只需从头铺设光轨便能够相应改动。是一种新式、高效、无污染的主动寻迹运送车,无人驾驭、安全牢靠、操作便利。可下降出产成本,进步出产功率。
1、体系总体方案
体系总体规划框图如图1所示,直流电机固定在运送车底座下侧,驱动后轮行进,步进电机操控前轮转向,PLC作为操控体系中心,并与步进电机、直流电机及触摸屏相连,得到速度、方位和障碍物信息一起输出相应的操控指令到直流电机、电磁制动器及步进电机。触摸屏作为操作界面,给用户供给一个可视化的操作渠道。
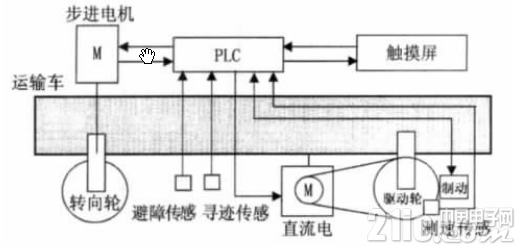
图1 体系总体规划框图
体系规划可划分为信号检测部分和操控部分。其间,信号检测部分包含轨迹线检测规划、障碍物检测规划、速度检测规划,操控部分包含驱动操控规划、制动操控规划、转向操控规划。体系总体规划流程图如图2所示。
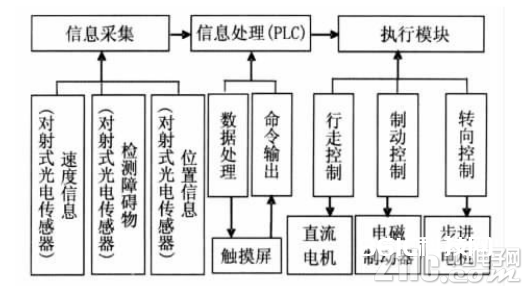
图2 体系总体规划流程图
运送车循迹采纳光电勘探法的原理。在车体底部设备3只光电传感器,运送车在地板上依照引导线主动运转时不断地向地上发射红外光。因为光电管对不同色彩的物体外表具有不同的反射性质的特色:当红外光遇到绿色引导线时产生漫反射,反射光被装在运送车上的接纳管接纳,输出为低电平;假如遇到其他色彩则红外光被吸收,输出为高电平。可编程操控器便可依据3只光电传感器的状况编码为依据来确认引导线的方位和运送车的行走路线闭。运送车主动寻迹的方位状况编码如图3 所示。
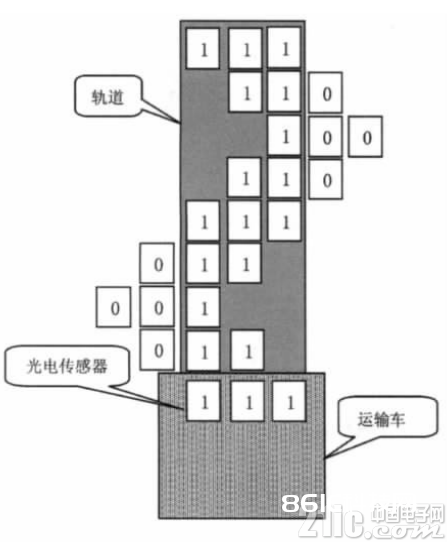
图3 运送车方位状况编码图
2、体系硬件规划
2.1转向及驱动操控电路规划
本规划运送车载重不超越70kg,对电机的负载才能有必定的要求,因为直流减速电机滚动力矩大,能够产生较大转矩,因而挑选xM4—10125A型直流减速电机作为该体系的驱动电机,该电机自带一个小链轮,齿数z1为9,选取大链轮齿数z2为19,所以传动比i为:
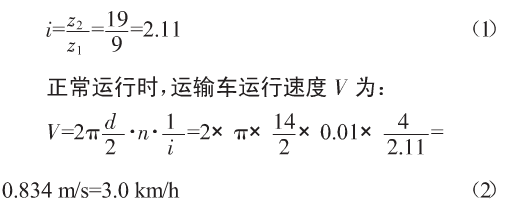
式中:n为直流电机输出转速,4r,s;d为运送车驱动轮直径,14cm。
驱动电机衔接电路图如图4所示。电机通电后经链条传动使驱动轮滚动。本规划将PLC输出端Y2与两相继电器J5相连,当Y2低电平时,J5活动触点KM 与触点l衔接,电机正转;反之Y2高电平时,J5活动触点KM与触点2衔接,电机回转。电机驱动器(CT一30lA9)经过J5衔接电机,调整ADJ端子参数能够改动电机转速,检测到的路况输入信号,经过PLC操控单元进行核算并按成果的要求输出操控信号到Y2端,操控电机的正回转,然后完成运送车的行进、撤退。
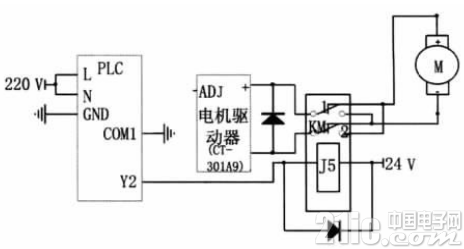
图4 驱动电机链接电路图
如图5所示,PLC输出端Yo衔接到步进电机驱动器的Pu(步进脉冲信号),Y1衔接到DR(方向操控)。PLC依据传感器检测到的信号,进行程序操控,当运送车违背引导线时,Yo接通,步进电机开端作业(初始设置为右转),当判别需求左转时,Y1接通,操控步进电机反方向滚动。
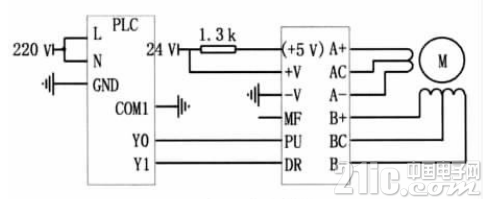
图5 步进电机接线图
2.2光电检测电路规划
归纳各种光电检测器材的功能及本规划的具体要求,选用RPR220型光电对管。其发射器是一个砷化镓红外发光二极管,而接纳器是一个高灵敏度硅平面光电三极管。当发光二极管宣布的光反射回来时,三极管导通输出低电平。此光电对管调度电路简略,作业功能安稳。
光电检测电路如图6所示。车体上的3个光电管对途径信息进行检测,将检测到的信号送到PLC输入端,从左至右记作:x1、x2、x3,当PLC检测到的信号为低电平时,则红外光被地上的绿色引导线反射,标明运送车处在绿色引导线上;反之运送车现已违背轨迹。光电传感器的输入电压为5V,而全体规划中输入模块选用的电压为24V。选用稳压管LM317,调整电位器使其输出电压恒为5V,保证光电传感器的正常作业。
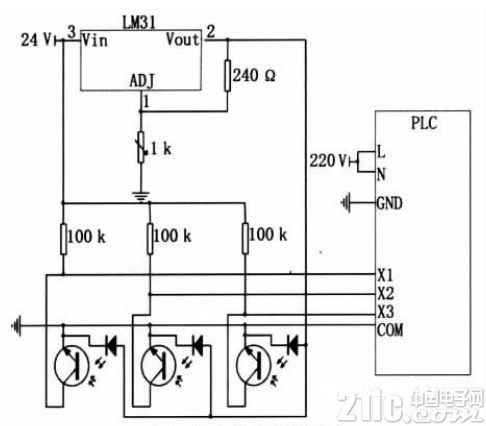
图6 光电检测电路规划
2.3测速传感器电路规划
本规划选用测速传感器来获取运送车当时速度,其效果首要有:
1)监控运送车速度改动,为弯道速度操控供给参阅;
2)完成速度的闭环操控,添加运送车安稳性。体系的首要操控对象是转向轮和驱动轮。测速传感器设备于运送车驱动轮邻近,测速轮设备在接近运送车驱动轮的轴上,测速轮上开有距离均匀的30个小齿,即齿轮滚动一周,测速传感器检测到30个脉冲。当运送车运转时,测速传感器不断输出脉冲,其脉冲个数存放到 PLC的内部寄存器中。测速传感器电路规划如图7所示。依据式(3)核算出驱动轮每分钟滚动的转数N,再结合驱动轮的直径就可算出运送车当时的运转速度 V。
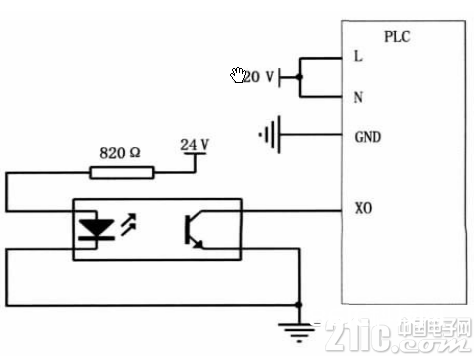
图7 测速传感器电路规划图

式中:n为测速轮每一周测得脉冲数,n=30;D5为测速传感器测速时段输出脉冲个数;t为测速时段的计数时刻,ms。
2.4速度操控电路规划
速度操控电路如图8。由传感器收集到的信号输入到PLC上,经PLC处理后传送到Y端,3个输出端Y11、Y12、Y13经过继电器J1、J2、J3别离衔接不同的分压电路,电阻值的不同使得所分电压不同,一起电机驱动器(CT一301A9)输出产生改动,然后操控电机转速,完成速度操控。
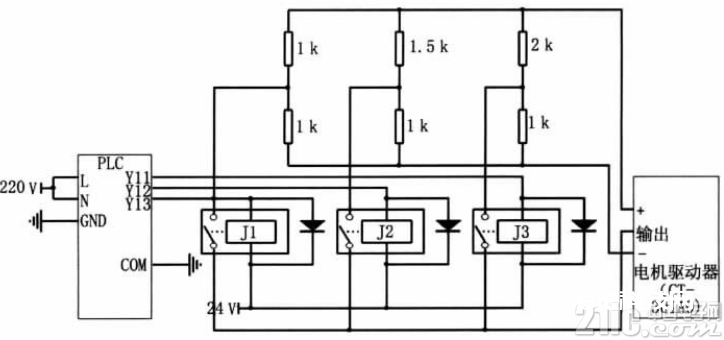
图8 速度操控电路规划
2.5避障电路规划
障碍物检测电路规划如图9所示。在运送车的四周设备有红外光电传感器,其检测原理与路面检测类似,当运送车运转时,传感器检测到人或其他障碍物,输出为低电平,经过输入端传送到PLC,进行数据处理,输出报警信号,反之,输出高电平。
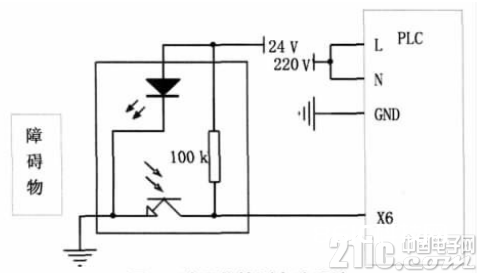
图9 障碍物检测电路规划
2.6制动电路规划
制动电路规划如图10所示。运送车遇到障碍物或到站时,需求主动中止。中止由PLC编程操控,因而只需将输出端Y4衔接制动设备即可。本规划由继电器J4动作然后经过电感的吸合效果带动绕在驱动轮上的皮带操控运送车的制动。
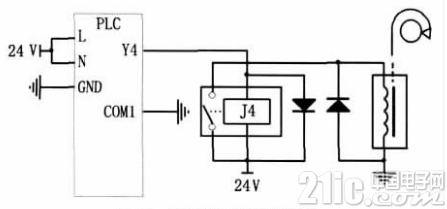
图10 制动操控电路规划
3、体系软件规划
运送车的操控选用模块化的结构,其基本思路是:将方位传感器收集来的路途信息、速度传感器收集来的速度信息和避障传感器检测到的障碍物信息经PLC处理,输出PwM信号到舵机和驱动电机。方向操控和速度操控体系别离构成两个闭环体系,两者可相互影响,比方依据途径辨认的成果来操控速度,使得运送车在弯道上慢速,而在直道上快速。软件规划流程图如图11所示。
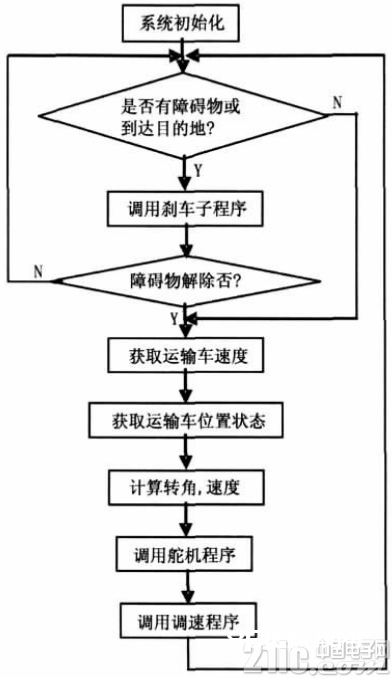
图11 主程序流程图
方向操控:运送车舵机是由舵轮、机械结构、步进电机和操控电路组成的一个方位随动体系。经过内部的方位反应来完成舵轮输出转角正比于给定的操控信号。本规划将方位传感器反应的路面信息、测速传感器测得的速度信息和避障传感器检测到的障碍物信息,经过PLC操控单元进行核算并按成果的操控要求向步进电机宣布指令(PWM信号方式),经过对步进电机的正回转操控来完成舵轮的正回转,在脉宽改动时,使其主动改动到对应值。
速度操控:直流电机转速的操控选用PWM(脉宽调制)调速办法。为进一步准确操控运送车速度,还需求引进闭环速度操控。使用方位传感器、速度传感器和避障传感器检测到的实时信息与希望速度之间的比较来确认输出到直流电机的PWM信号,然后确认加快或减速强度的巨细。
4、定论
本体系选用PLC作为中心操控器,选用机电一体化规划,已完成了样机制造,可完成物料的主动运送,现在处于程序优化阶段。相对于国内常见的轨迹运送体系,本体系体积较小、设备便利,轨迹铺设简略,依据出产工序张贴轨迹纸便可完成无人驾驭;出产工序改动时,无需从头铺设铁轨,不损坏路面,然后保证了主动运送车的平稳运转。该体系根据光学引导的思路完成简略,导向牢靠,能够大幅度下降出产成本,有利于愈加广泛推行和使用。该体系选用触摸屏对主动寻迹运送车进行操控,直接挑选屏幕上的菜单,便可操作运送车。该体系装备了主动检测、报警及避障设备,愈加安全牢靠,大大减少了不安全事端的产生。






