


摘要:运用ZigBee通讯协议栈和可编程片上体系(System On a Programmable Chip,SOPC)技能,完结了两个三维移动天线渠道的和谐动作与归纳操控。通过规划契合Avalon总线规范的自界说步进电机操控模块,减小了步进电机操控的软件开支。运用激光测距传感器,完结三维移动渠道的准确认位。构建了依据ZigBee技能的分布式无线通讯网络。结合μC/OS—II实时操作体系,增强了多使命的实时性。体系具有集成度高、可扩展性强、牢靠性高和操控精度高的特色。
要害词:可编程片上体系;无线通讯技能;自界说IP核;嵌入式操作体系;激光测距传感器
导言
高精度的三维移动天线渠道在许多测验丈量场合得到广泛应用。但是,现有的高精度天线渠道大多为单一渠道,本文提出了一种多渠道组合操控、和谐作业的解决办法。
1 体系组成
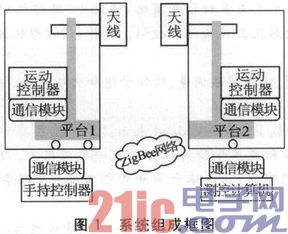
三维移动天线渠道体系依照功用区分,主要由测控体系、通讯网络、运动履行机构组成,如图1所示。其间,测控体系由测控核算机、手持操控器组成;通讯网络选用ZigBee无线通讯网络;运动履行机构由两个差动转速轮式移动渠道搭载高精度天线桅杆构成。运动履行机构装有两个ELDS—C高精度激光测距传感器(测距规模0.05~30 m、精度±3 mm)及用于移动渠道初始对准的一字激光发射器和接收器。
2 运动履行体系规划
2.1 运动履行机构坐标界说
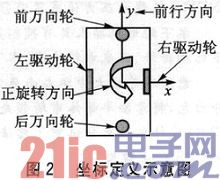
为了确认运动履行机构的移动方向与坐标,界说天线移动渠道坐标系,如图2所示。以两水平移动操控电机同步正转跋涉方向为y正方向,以从x轴方向向y轴方向旋转为渠道旋转正方向(对应旋转操控电机正转),天线向上升高方向为z正方向(对应升降操控电机正转)。
2.2 运动操控器硬件规划
运动操控器在水平移动操控电机、天线升降移动操控电机、天线旋转极化操控电机以及激光测距传感器等部件的支持下完结天线方位与姿势的丈量与操控。运动操控器分为主控板和接口板两部分。
2.2.1 主控板
运动操控器主控板由处理器单元(Nios II软核)、存储器、JTAG调试接口等组成,它具有通用的DI、DO、RS232等接口。
中心芯片选用Atera公司的Cyclone II系列FPGA芯片EP2C8Q208C。Altera Cyclone II选用全铜层、1.2 VSRAM工艺规划,Cyclone II器材供给了4 608到68 416个逻辑单元(LE),并具有一整套最佳的功用,包括嵌入式18位×18位乘法器、专用外部存储器接口电路、4 Kb嵌入式存储器块、锁相环(PLL)和高速差分I/O才能。主控板组成框图如图3所示。

2.2.2 接口板
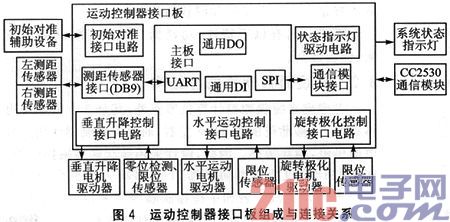
接口板是针对测控方针的测控需求与电气接口特色规划的,它将主控板的通用电接口转换为测控专用接口,包括水平运动操控接口电路、笔直升降运动操控接口电路、旋转极化操控接口电路、初始对准辅佐设备接口电路、体系状况灯驱动电路等,其组成与衔接联系如图4所示。
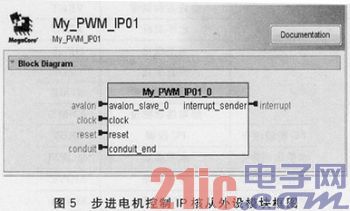
步进电机操控接口部分充分运用Nios II软核的高度可制定性,自界说规划了一个契合Avalon总线规范的步进电机操控IP核。该IP核能够像操作规范外设相同读写相应寄存器,完结详细的操控。其寄存器映射如表1所列。其间,period寄存器值对应电机运转速度,number寄存器对应电机运转间隔。

图5为Quartus II软件生成的步进电机操控IP核的从外设框图。
2.3 运动操控器软件规划
因为运动操控器需求完结本地按键使命、长途键盘使命、PC机使命,其间PC机使命又分为渠道水平初始对准使命、天线笔直调零使命、天线极化调零使命、运动使命等,因而运动操控器软件体系运用μC/OS—II实时操作体系完结使命的调度和处理。
体系上电完结必要设备初始化之后,操控通讯模块上电,完结无线组网功用。操作体系创立本地按键使命、长途键盘使命和PC机使命。本地按键使命由外部中止触发Key_Sem信号量操控履行。长途键盘使命和PC机使命由通讯模块操控履行。按键指令格局:KEY:key_value:YEK(12字节),按键指令取值如表2所列。

核算机指令取值如表3所列,核算机指令格局如下:
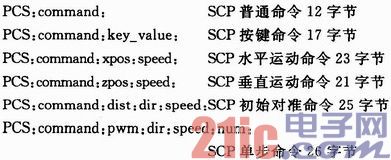

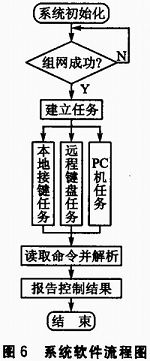
体系指令可区分为简略非定量指令(跋涉、撤退等),杂乱非定量指令(水平对准、笔直调零等)和定量指令(水平运动、笔直运动)3种。其间简略非定量指令在相应使命中获取解析后直接读/写步进电机操控模块寄存器完结操控。而接到杂乱非定量指令后,依据指令取值树立不同的使命,在新建使命完结相应操作后向指令发送方回复应对数据,并删去本身,等候下一次指令再次新建该使命。定量指令包括坐标值指令(水平指令、笔直指令)和寄存器值指令(单步指令)。单步指令中包括相应电机操控寄存器值(即包括速度、间隔、方向操控信息),相应使命直接提取数据完结电机操控。坐标值指令包括预订方针x、y坐标值,体系依据本身坐标(当时传感器值)核算得出电机操控寄存器值完结动作。体系软件流程图如图6所示。
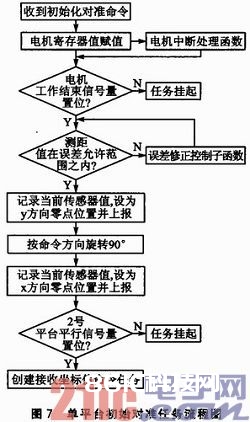
体系子使命中,水平初始对准使命和天线笔直调零使命最为重要。它不仅是移动渠道方位初始化进程,更是体系树立空间坐标系的根底。因而,该使命完结的好坏,直接影响移动渠道操控的牢靠性。规划完善的应对机制,合理地运用信号量、标志组等,是使命规划合理牢靠的要害。其简化流程图如图7所示。
3 无线通讯规划
3.1 ZigBee技能简介
ZigBee技能是一种应用于短间隔、低传输数据速率下的各种电子设备之间的无线通讯技能。我国现在能够运用的ISM(Industrial,Scien tific and Medical)频带为433MHz和2.4 GHz。ZigBee技能在我国作业在2.4 GHz频段,选用较高阶的QPSK调制技能,能够到达250 kb/s的速率,并削减作业时间,以降低功耗。在MAC层选用CSMA/CA方法,以进步体系兼容性。网络层方面,ZigBee联盟规则能够选用星形和网状拓扑。
ZigBee具有以下特性:功耗低、牢靠性高、网络容量大、保密性高。
3.2 无线通讯网络拓扑结构
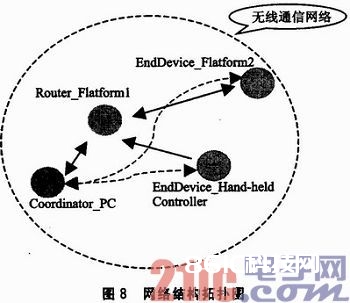
考虑到体系除测控核算机节点外,其他3个节点均为移动节点,移动规模在30 m左右,而手持操控器运用5号电池供电,功耗灵敏。因而,规划选用簇状网络拓扑结构。即测控核算机为网络和谐器,1号移动天线渠道为路由器,2号移动天线渠道和手持操控器为终端设备。手持操控器选用低频唤醒机制以延伸电池运用寿命。网络拓扑图如图8所示。
结语
针对双三维移动天线渠道准确认位与操控,提出了一种切实可行的计划。通过试验验证,移动天线渠道跋涉方向差错5 mm。天线水平极化和笔直极化差错0.2°。体系充分运用了SOPC技能优势,完结了两渠道的归纳操控和和谐作业。证明了体系具有高精度、高牢靠性、高集成等特色。






