


1 布景常识

图1 二值图画鸿沟提取演示
如图1 所示,图1 a为一幅简略的二值图画,通过鸿沟提取后构成如图1 b 所示的图画,显现出了白色区域的概括。
2 鸿沟提取算法
运用黑色提取,布景为白色,‘1’表明白色,‘0’表明黑色。
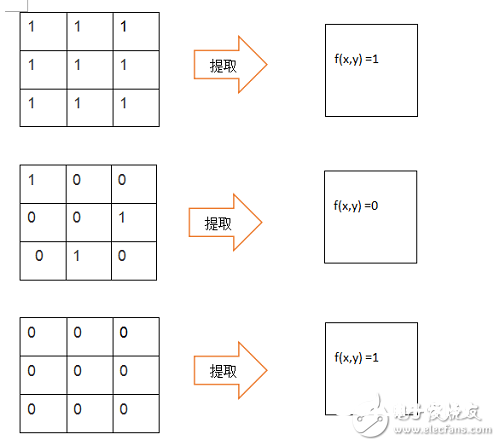
图2 二值图画鸿沟提取演示
咱们运用3×3模板进行鸿沟提取,所以当3×3九个点都是‘1’的时分,输出为‘1’,当九个点都是‘0’的时分,输出为‘1’,其他状况输出均为‘0’。
3 FPGA二值图画鸿沟提取算法完成

图2 二值图画胀大FPGA模块架构
图2中咱们运用串口传图传入的是二值图画。
FPGA源码:
/*
Module name: boundary_extracTIon.v
DescripTIon: binary image boundary extracTIon
*/
`TImescale 1ns/1ps
module boundary_extraction(
input clk, //pixel clk
input rst_n,
input hs_in,
input vs_in,
input [15:0] data_in,
input data_in_en,
output hs_out,
output vs_out,
output reg [15:0] data_out,
output data_out_en
);
wire [15:0] line0;
wire [15:0] line1;
wire [15:0] line2;
reg [15:0] line0_data0;
reg [15:0] line0_data1;
reg [15:0] line0_data2;
reg [15:0] line1_data0;
reg [15:0] line1_data1;
reg [15:0] line1_data2;
reg [15:0] line2_data0;
reg [15:0] line2_data1;
reg [15:0] line2_data2;
reg data_out_en0;
reg data_out_en1;
reg data_out_en2;
reg hs_r0;
reg hs_r1;
reg hs_r2;
reg vs_r0;
reg vs_r1;
reg vs_r2;
wire[18:0] result_data;
line3x3 line3x3_inst(
.clken(data_in_en),
.clock(clk),
.shiftin(data_in),
.shiftout(),
.taps0x(line0),
.taps1x(line1),
.taps2x(line2)
);
//——————————————————————————
// Form an image matrix of three multiplied by three
//——————————————————————————
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
line0_data0 <= 16'b0;
line0_data1 <= 16'b0;
line0_data2 <= 16'b0;
line1_data0 <= 16'b0;
line1_data1 <= 16'b0;
line1_data2 <= 16'b0;
line2_data0 <= 16'b0;
line2_data1 <= 16'b0;
line2_data2 <= 16'b0;
data_out_en0 <= 1'b0;
data_out_en1 <= 1'b0;
data_out_en2 <= 1'b0;
hs_r0 <= 1'b0;
hs_r1 <= 1'b0;
hs_r2 <= 1'b0;
vs_r0 <= 1'b0;
vs_r1 <= 1'b0;
vs_r2 <= 1'b0;
end
else if(data_in_en) begin
line0_data0 <= line0;
line0_data1 <= line0_data0;
line0_data2 <= line0_data1;
line1_data0 <= line1;
line1_data1 <= line1_data0;
line1_data2 <= line1_data1;
line2_data0 <= line2;
line2_data1 <= line2_data0;
line2_data2 <= line2_data1;
data_out_en0 <= data_in_en;
data_out_en1 <= data_out_en0;
data_out_en2 <= data_out_en1;
hs_r0 <= hs_in;
hs_r1 <= hs_r0;
hs_r2 <= hs_r1;
vs_r0 <= vs_in;
vs_r1 <= vs_r0;
vs_r2 <= vs_r1;
end
end
//——————————————————————-
// line0_data0 line0_data1 line0_data2
// line1_data0 line1_data1 line1_data2
// line2_data0 line2_data1 line2_data2
//——————————————————————–
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
data_out <= 16'h0000;
else if(data_out_en1)
if((line0_data0 == 16'h0000) && (line0_data1 == 16'h0000) && (line0_data2 == 16'h0000) && (line1_data0 == 16'h0000) && (line1_data1 == 16'h0000) && (line1_data2 == 16'h0000) && (line2_data0 == 16'h0000) && (line2_data1 == 16'h0000) && (line2_data2 == 16'h0000))
data_out <= 16'hffff;
else if((line0_data0 == 16'hffff) && (line0_data1 == 16'hffff) && (line0_data2 == 16'hffff) && (line1_data0 == 16'hffff) && (line1_data1 == 16'hffff) && (line1_data2 == 16'hffff) && (line2_data0 == 16'hffff) && (line2_data1 == 16'hffff) && (line2_data2 == 16'hffff))
data_out <= 16'hffff;
else
data_out <= 16'h0000;
end
endmodule
4试验成果
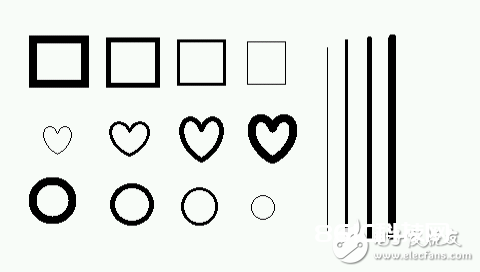
图5 试验原图1
图6试验原图2
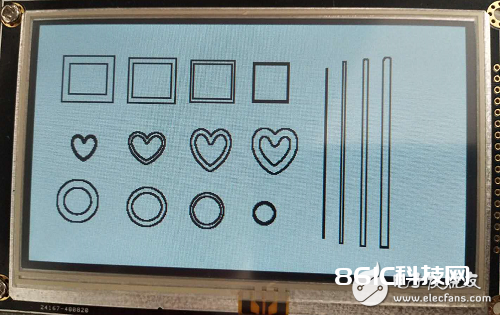
图7 试验成果图1

图8 试验成果图2
成果剖析:图5和图7比照,比较粗的线都被查找出了边际,只要最细的那条没有被提取出来,而且被加粗,原因是最细的线条只要三个像素当查找出边际后显现为黑色,两头黑色连在一起所以线条就变粗了。图6和图8边际查找没有问题。






