1. 步进电机是将电脉冲信号转变为角位移或线位移的开环操控元件。在非超载的情况下,电机的转速,中止的方位只取决于操控脉冲信号的频率和脉冲数
2. 脉冲数越多,电机滚动的视点越大。
3. 脉冲的频率越高,电机转速越快,但不能超过最高频率,不然电机的力矩敏捷减小,电机不转。
步进电机的品种
按力矩发生的原理分为反响式和激磁式(目前我国运用的大都是反响式)
反响式:转子无绕组,由被激磁的定子发生反响力矩完成步进运转
激磁式:定,转子均有激磁绕组(或转子用永久磁钢),由电磁力矩完成步进
按输出力矩巨细分为伺服式和功率式
伺服式:输出力矩在百分之几至十分之几(N*M)只能驱动较小的负载,要与液压所知放大器配用,才干驱动机床作业台等骗局的负载
功率式:输出力矩在5-50N*M以上,能够直接驱动机床作业台等骗局的负载
按定子数分为单定子式,双定子式,三定子式,多定子式
按各相绕组散布分为径向散布式,轴向散布式
径向散布式:电机各相按圆周顺次摆放
轴向散布式:电机各相按轴向顺次摆放

—————
步进电机的作业原理实际上是电磁铁的效果原理。
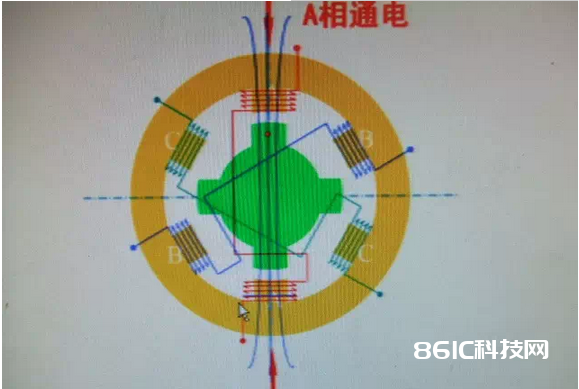
通电后会招引最近的齿
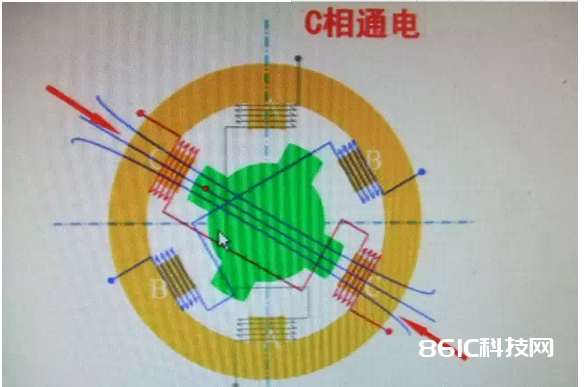
A-B-C-A 时是逆时针 A-C-B-A 时为顺时针 这两种作业方式时三相单三拍
三相六拍A-AB-B-BC-C-CA-A
三相双三拍 AB-BC-CA-AB
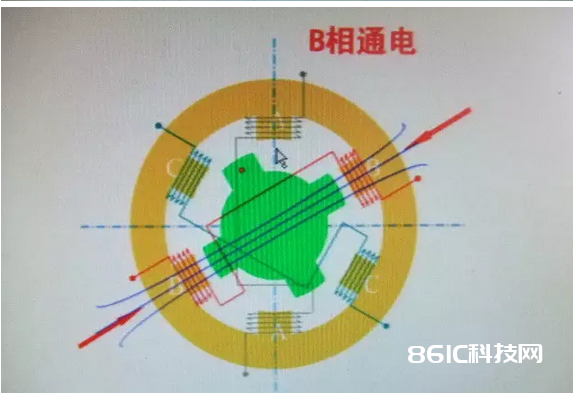
当某相定子励磁后,它招引转子,转子的齿与该相定子磁极上的齿对齐,转子滚动一个视点,换一相得电时,转子又滚动一个视点。如此每相不停地轮番通电,转子不停地滚动。
电机运转的方向和通电的相序有关,改动通电的相序,电机的运转方向也就改动
步距角; 电机每拍滚动的视点
步距角=360/(mzk)
M为定子绕组的相数。Z为转子的齿数。M相M拍时K为1,M相2M拍时K为2