0 前语
北京理工大学自行研发的根据Stewart 原理的BKXI型变轴数控机床如图1 所示。是经过操控6 根可弹性杆的弹性运动完结动渠道6个自由度的改动,然后带动刀具完结6 自由度的加工。本文介绍与之相配套的根据IPC+PMAC硬件渠道和Win2000、Vc6.0、Pcomm32pro 软件渠道的开放式数控体系,该体系选用模块化规划,面向用户,操作便利,具有杰出的易保护性和可扩展性。

图1 BKX- I 变轴数控机床
1 BKX- I 型变轴机床的数控体系
1.1 数控体系的硬件构成及完结
该数控体系选用上下位机(即工业操控机IPC+多轴操控卡PMAC) 形式的硬件数控结构,如图2 所示。

图2 数控体系硬件构成
IPC 充分使用Windows2000 以及其它干流操作体系的普及性,完结对体系便利的办理及保护;PMAC 则完结对机床的6 + 1轴运动的实时操控以及对开关量详细实时操控。
上位机与下位机之间的通讯选用总线通讯方法。下位机实时监测和保存机床的运动状况,并根据上位机的要求和外部机床开关量的信号对机床进行实时的操控。上位机则守时查询下位机的作业状况以及下位机保存的机床状况信息,如PMAC 缓冲区的巨细、机床开关量信号等等,然后根据下位机的作业状况、机床的作业状况以及作业人员的要求对下位机通讯,一起给作业人员供给相应的提示。
BKX-I型变轴机床不同于传统机床,其6个自由度是耦合在一起的,不管进行什么样的运动都是根据6条腿的和谐运动完结。主轴的运动是相对独立于这6条腿运动的,选用变频器操控,完结无级变速,考虑到PMAC 是8轴操控卡,使用容余轴的操控通道,本体系将主轴也加入到PMAC 的操控中来,详细完结如下:
(1) 在PMAC 卡中把6 条腿的和谐运动操控设定在一个坐标系&1 内,主轴运动则设定在另一个坐标系&2 内。
(2) 主轴的运转形式是速度形式, IPC经过对PMAC第4轴操控通道的DAC存储单元进行直接赋值操作,使DAC宣布0到10v 的模仿电压给变频器,然后完结对主轴速度的操控。6条腿选用速度-位移- 时刻操控形式, IPC把轨道点下载给PMAC,PMAC 根据已设定好参数完结对6条腿的实时操控。
(3) 对主轴电机的敞开和正回转的操控是使用PMAC 的I/O完结的。IPC经过对相应I/O的地址直接赋值来操作继电器的开关, 以此完结对主轴电机的敞开和换向功用以及完结对冷却泵的敞开功用。光滑和冷却的完结也是相同的。
对刀仪和工件定位器的信号也是经过PMAC的I/O口与PMAC进行通讯的,但此刻需求PMAC 后台PLC的守时扫描。上位机守时扫描下位机保存的信息,然后上位机根据所得信息作出相应的反响,完结刀具对刀和工件定位功用。
1.2 数控体系的软件使命调度
变轴机床的数控体系是一个多使命调度的操作体系。使命调度是完结数控体系软件操作的操控中心。它实时监控各使命的状况,决议使命获取CPU 的优先权,并根据调度的战略改动使命的状况。使命的区分则首要根据各个事情的彼此独立性来区分,根据面向对象和开放式数控体系的思维,本数控体系的使命首要区分为:下位机实时使命调度和上位机多使命调度,如图3所示。
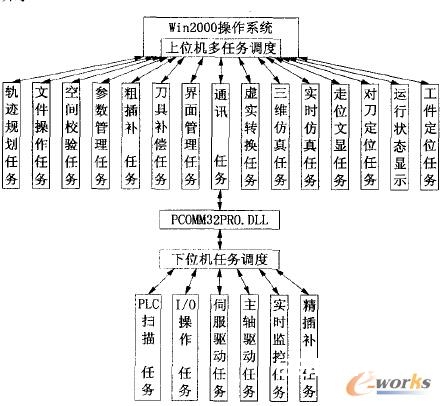
图3 数控体系的使命调度
1.2.1 数控体系的下位机实时多使命调度
望文生义实时使命是指实时性要求较高的使命,需求较高的优先权,实时使命又分为以下几个使命:
(1) PLC扫描使命:下位机后台PLC使命是周期性扫描机床来完结某些次序操控。
(2) I/O操作使命:下位机根据上位机的指令翻开和封闭I/O ,一起监控I/O的输入。
(3)伺服操控:下位机根据上位机传输的指令和伺服电机的状况,实时地进行伺服操控,伺服更新周期为442μm。
(4) 主轴电机驱动使命:下位机根据上位机的指令完结主轴电机速度的操控。
(5) 实时监控使命:下位机根据PLC扫描以及伺服驱动器反应信号完结对机床作业状况的实时监控。
(6) 精插补使命:下位机根据规定的插补周期和插补形式,对各轴的轨道进行相应的细分插补。
1.2.2 数控体系的上位机多使命调度
上位机多使命调度首要包含:
(1) 轨道规划使命:完结某些特定曲线轨道点的规划和生成使命。
(2) 文件操作使命:完结虚拟轴坐标文件、传统的G代码文件和机床6轴文件的翻开和存储使命。
(3)作业空间校验使命:对经过了轨道规划、粗插补的文件进行空间校验,以承认刀位轨道是否契合机床的操作空间要求。
(4)参数办理使命:完结对机床结构基本参数、运转参数和刀具参数的办理使命。
(5)粗插补使命:对已有的轨道点进行细分,准确操控机床运动的轨道。
(6)刀具补偿使命:补偿因刀具半径不同和刀具长度不同,所形成的机床实践轨道点失真问题。
(7)界面办理使命:完结作业人员对操作界面的办理,一起经过人机界面上的机床操作面板完结对机床运动的操控,图4为数控体系的人机界面。

图4 人机界面
(8)上下位机的通讯使命:在win2000 操作体系环境下, IPC经过调用Pcomm32pro 动态衔接库,完结上下位机的通讯,包含对PMAC 缓冲区状况的查询使命、PMAC 程序运转状况查询使命、IPC 程序下载使命和定位音讯查询使命等等。
(9) 真假改换使命:完结虚拟轴坐标和实轴坐标的转化。
(10) 三维仿真显现使命:为了确诊加工中存在的各种或许过错,能够先进行仿真操作,模仿机床的实践运动,以确保实践加工的正确性。
(11) 实时仿真使命:以图形的方法,实时地显现刀尖的轨道点方位,使操作人员易于监控机床的走位。
(12) 走位文显使命:以数字的方法,实时显现机床刀尖轨道点在虚轴坐标系下的方位和6 条腿的实践伸长量。
(13) 运转状况显现使命:实时显现机床的操作状况(主动、手动、微动) 、刀具的几许参数、主轴电机的作业状况和冷却泵的作业状况等。
(14) 对刀定位使命:完结刀具的定位功用,包含刀具的长度检测和半径检测。
(15) 工件定位使命:根据PMAC 的状况反应,把相应的程序运转指令传给下位机,一起记载和核算相应的作业状况完结工件在机床坐标系下的定位使命。
1.2.3 使命调度的完结
使命调度的完结根据各个使命的特色,分三种状况:
(1) 一次性调度: 人机界面、PLC 都是一次翻开后就循环履行,前者首要占用IPC 的前台处理,后者则是PMAC 后台周期完结。
(2) 条件调度:当某一条件具有时,才调度相应的使命,如插补某一形式的运转、作业空间的校验使命,以及对刀和工件定位程序的运转等都是归于这种使命调度。
(3) 守时调度:这种使命的调度实时性较强。伺服操控改写、机床方位数据收集、PMAC 的缓冲区的状况查询以及PMAC程序运转状况的查询等使命的调度都归于守时使命调度。
2 定论
以IPC + PMAC 为硬件渠道和由win2000、vc6. 0、Pcomm32pro为软件渠道,开发了根据BKX- I 型变轴机床的数控体系。而且完结了6 轴联动、主轴驱动、工件定位和对刀等集成操控,体系选用模块化规划,面向用户,对此类机床的产业化奠定了根底。