摘要:介绍一种智能勘探机器车,该车由智能勘探体系和数据接纳体系两部分组成。勘探体系分为中心板和使命板,中心板选用STC单片机 IAP15F2K61S2为操控单元,完结循迹、定位、码盘测速、360度回身,选用蓝牙模块完结与接纳体系无线通讯;使命板由温度和湿度传感器、超声波传感器、色彩传感器构成,完结测距、温度检测、湿度检测和色彩辨认。接纳体系相同以IAP15F2K61S2为中心,由蓝牙模块、12864液晶显现模块、语音播报部分组成,完结无线数据的接纳、数据的实时显现、同步语音播报的功用。
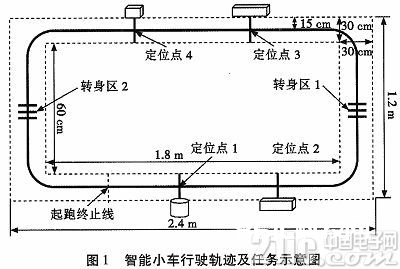
本文来源于全国大学生电子规划比赛,使命要求制造一台智能勘探机器车,能完结在特定轨迹上行进一周,在设定的使命点精准泊车,完结超声波测距,温湿度丈量,色彩辨认,360°回身等使命,一起要求将测得的数据经过无线通讯的方法传输到别的一台设备上,进行实时显现。在原有使命的基础上新增转向灯,模仿实在轿车行走状况,左转时左前和左后转向灯亮,右转时右前和右后转向灯亮,遇到黑线时灯全亮。每次使命完结会有蜂鸣器提示,一起在液晶显现体系有使命完结的语音提示。
1 体系规划
1.1 硬件规划
本体系首要有两大部分构成:智能勘探体系和数据接纳体系。主控芯片是智能小车智能勘探体系和接纳体系的中心,小车的操控、勘探、数据发送、接纳都是经过主控芯片衔接外围电路完结智能勘探车的各体系功用。选用的是宏晶科技出产的国产单片机IAP15F2K61S2,此款芯片具有高速、高牢靠、低功耗、超强搅扰等长处,可以彻底支撑智能勘探车完结使命要求的一切功用。
1.2 体系框图
体系全体框图由智能勘探体系和接纳体系两部分构成。
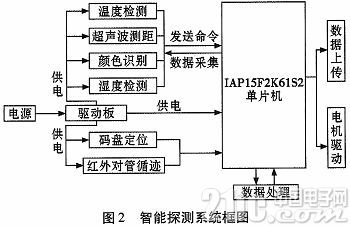
1.2.1 智能勘探体系
智能勘探体系由中心板和使命版两部分组成。中心板首要部分是IAP15F2K61S2芯片、电压转化模块、蓝牙发送模块以及外设和驱动电路。使命板首要包含波模块、色彩辨认、温湿度模块等电路,如图2所示。
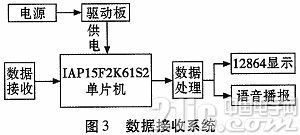
1.2.2 接纳体系
接纳体系首要由IAP15F2K61S2芯片,语音模块、LCD12864显现模块,蓝牙接纳模块组成,如图3所示。
1.3 软件规划
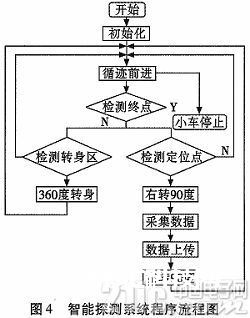
程序规划相同分为智能勘探体系和数据接纳体系两个部分。智能勘探体系规划流程图如图4所示。数据接纳体系流程图略。
2 理论剖析与核算
2.1 循迹电路剖析
循迹电路选用8路红外对管进行循迹线、定位点、回身区、起点终点线进行循,循迹灯次序从左到右是0到7八个红外对管,红外对管照在黑线输出高电平,遇到全黑(2 cm)时全灭;照到白色部分输出低电平,遇到全白部分时全亮。
当红外对管4、5遇到黑线时,全速前进,当循迹是其他对管,都要进行不同程度的微调(向左或向右),越接近两头,调的起伏越大。小车电机的驱动芯片是 L298N,该芯片内部是H桥电路,可以操控电机的正回转。小车驱动板的PWM驱动是完结小车转向的必要条件,经过PWM操控小车的速度,然后完结转向。
2.2 准确定位和360度回身模块剖析与核算
小车准确定位中,需求完结90°、360°回身,小车是经过光电码盘完结小车的准确定位和回身。依据小车旋转一周码盘计数值与实践丈量相结合进行调理完结360°准确回身。
2.3 温度、湿度检测模块剖析
使命中要完结定点1的温度检测和定点4的湿度检测,这儿运用的是DHT11温湿度传感器。此模块的传感器有VCC、DATA、NC、 GND四个管脚,NC是悬空状况,这儿将NC和VCC衔接在一起,DHT和中心板上的P1.3衔接,GND引脚接地。首要完结对温度、湿度的检测,然后将检测到的信号转化成数字信号。然后送到单片机进行剖析处理,然后得到定位点1的温度值和定位点4的湿度值。
2.4 超声波检测模块剖析
定位点2要完结超声波对间隔进行检测,咱们使用%&&&&&%L7555振动发生一个40 kHz的方波信号发射,然后经过CX20106芯片处理信号接纳。当CX20106芯片1管脚超声波信号输入端接纳到40 kHz的信号时,会在第7管脚遥控指令输出端发生一个低电平下降脉冲,这个信号可以接到单片机的外部中止引脚作为中止信号输入,用于核算时刻差。经过单片机来核算发射信号到收到信号时发生下降沿的这段时刻的长度,再经过数学核算,转化为间隔,显现在液晶显现器上。
3 测验数据及剖析
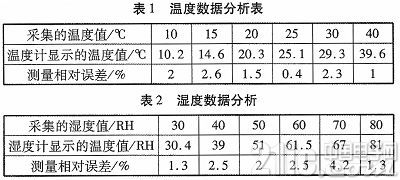
3.1 温度、湿度数据收集
测验条件是:在定位点1一侧,放置圆柱形容器直径6 cm,高度25 cm,内装液体水,用于调理环境温度,对温度进行收集,测验成果与温度计比较如表1所示。在定位点4一侧,放置一个加湿器,加湿器可前后移动10 cm~30 cm,用于调理环境湿度,并对温度进行收集,测验成果和湿度计比较如表2所示。
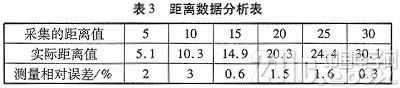
3.2 超声波测距数据收集
测验条件:在定位点2处放置长方体尺度长度20 cm,高度25 cm,2 cm左右,长方体可前后移动10 cm~20 cm,测验成果与卷尺丈量成果比较成果如表3所示。
4 小结
经过屡次的模块独自调试和全体软硬件结合调试,不断地对体系、程序进行优化,小车能比较流通的沿着黑线循迹,完结4个定位点的准确定位,并在回身区内完结 360°回身;完结温湿度、超声波、色彩等数据收集及显现,并经过蓝牙串口通讯完结了数据无线发送,上位机无线接纳数据,可以进行数据显现和语音播报。