近年来,跟着数字电子技能的开展,电机的调速技能也得以迅速开展。数字式电子调速器以其操控精度高、呼应速度快,能够有效地进步发动机的调速功用,延伸发动机的运用寿命的长处得以广泛应用。在此基础上,本文规划了一种根据ARM的实时准确操控直流电机转速的数字式电子调速器。
1 直流电机调速原理
1.1 直流电机的作业原理
根据直流电机的机械特性知,直流电机的调速计划有三种:改动电源电压;改动电枢电阻;弱磁调速(即改动励磁磁通)。改动电枢电阻的办法会引起电机机械特性变软,使转速的安稳性变差。弱磁调速在低速时遭到磁极饱满的约束,在高速时受换向火花和换向器结构强度的约束,并且励磁线圈电感较大,动态呼应较差。所以在本规划中选用改动电源电压的调速计划。
1.2 PWM控速原理
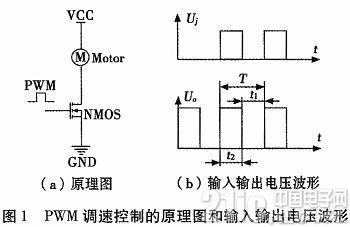
图1是运用开关管对直流电动机进行PWM调速操控的原理图和输入输出电压波形。在图1(a)中,当开关栅极输入高电平时,开关管导通,直流电动机电枢绕组两头有电压Us。t1秒后,栅极输入变为低电平,开关管到,电动机电枢两头电压为0。t2秒后,栅极输入从头变为高电平。开关管重复前面的动作。这样,对应着输入电平的凹凸。直流电动机绕组两头的电压波形如图1(b)所示。电动机绕组两头的电压平均值为:
经过改动α的值能够改动电枢绕组两头电压的平均值,然后到达调速的意图,这是PWM调速原理。
2 数字式电子调速器规划
数字式电子调速器由操控器、执行器驱动组织、执行器和传感器四部分组成。
本规划选用飞思卡尔根据ARM@Cortex@-M4内核的32位微操控器Kinetis。K60系列的MK60DN512ZVLQ10(以下简称K60)操控器,其作业电压2.7 V-5.5 V,总线频率可达100 MHz,其具有512 kB的FLASH和128 kB的SRAM。它能完结电击调速、操控运算、检测调速器作业状况以及与外部设备通讯联络等功用。执行器驱动组织由H桥驱动电路构成。执行器为伺服直流电机。传感器选用欧姆龙集团的E6A2-CW3E光电编码器。此外为了调试便利,选用蓝牙串口通讯模块作为与上位机通讯模块。
2.1 调速器结构
本规划由K60作为操控器,完结与上位机之间的通讯,一起经过收集车轮转速与设定值进行比较,然后选用PWM对电机转速进行调控。
2.2 ARM接口电路的规划
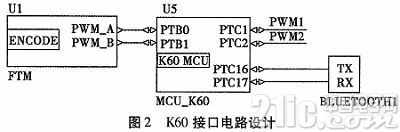
K60内部集成了正交解码,PWM输出以及串口通讯外设。光电编码器能够对电机的转速进行丈量,该光电编码器经过齿轮与电机齿轮相啮合,电机滚动时编码器会发生A、B相脉冲,两相脉冲信号相位相差90°。编码器发生信号后,K60对应的GPT0口将收集PWM信号,此刻A相信号作为方向判别信号,即当A相超前B相90°时,电机正转;A相滞后B相90°时,电机回转。B相信号作为电机转速信号运用。图2为K60接口电路的规划。
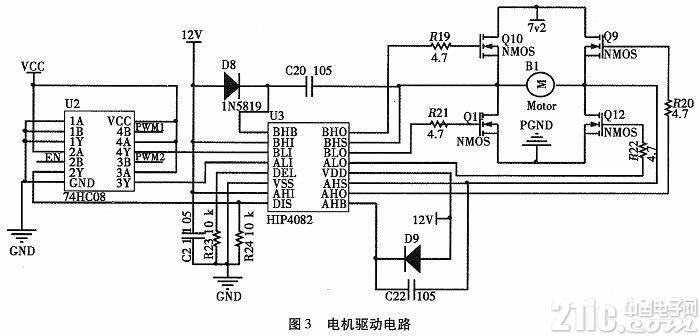
2.3 电机驱动电路
电机驱动电路运用74HC08与门、HIP4082芯片作为K60与H桥之间的桥梁。74HC08接纳K60发生的PWM信号,经过与运算发生PWM信号。HIP4 082芯片具有阻隔功用,对K60起到维护效果,另一方面HIP4082为NMOS供给适宜的漏、源电压使H桥相应桥臂导通进而对电机进行驱动。图3为电机驱动电路。
2.4 串口通讯模块
因为蓝牙具有串口通讯功用,且蓝牙传输轻巧便利,通讯简略,故选用蓝牙模块与上位机进行通讯。
3 调速器软件规划
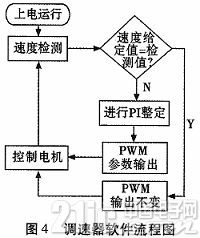
本规划选用转速负反应和PI调理器的单闭环负反应进行调速,该调速器能够确保在体系安稳的条件下完成无转速静态差错。
本规划由K60经过光电编码器测得电机转速的实践值与目标值进行比照发生差错值。差错值经过PI调理器后发生PWM输出值,由K60输出PWM到电机驱动电路对电机转速进行调理。软件流程图如图4所示。
4 调试
上位机经过串口通讯给K60传递调速器的参数和电机速度的没定值。K60经过比较剖析实践值与设定值之差,经由调理器核算得出操控电机的PWM输出值。例如:上位机设定电机转速为1.5 m/s,设定值经串口通讯传递给下位机。一起下位机将测得数据反应到上位机,数据有0.084 s的上升时刻,峰值为1.55 m/s,超调量为3.3%,调整时刻为0.208 s。如图5所示。
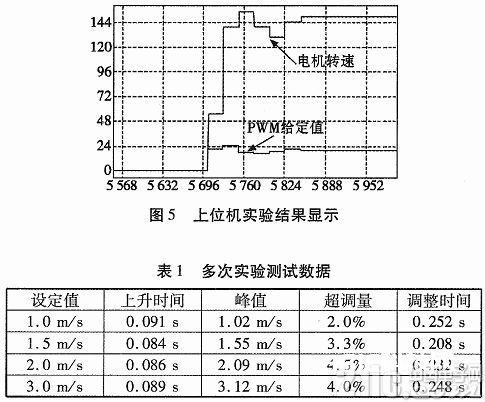
经过数次试验得出如下数据见表1。
表1中的数据阐明,所规划的调速器能够实时准确操控电机转速,具有超调量小,调整时刻短的特色。
5 总结
本文规划的根据ARM的直流电机数字式电子调速器,充分运用了飞思卡尔K60处理器中的资源,降低了调速器体系的复杂性,并且体系所具有的实时调控、超调小、调整时刻短、无转速静态差错等特色能够促进该体系在各方面的广泛应用。