有一些网友学欠好LM567的锁相环电路(主要是指我自己),主要是总是跑频,下面是一个网友发给我的电路,我感觉十分的好,就发上来共享了。
本电路的巧处就在于它用的LM567的内部检测电路作频率产生,使电路和主频主动跟从校正。本电路能够用在主动干手机,无触点开关,间隔感应器件上。
原图有一些值没有写,我通过实验得出了有用的值,现已标在电路中。
电路图:
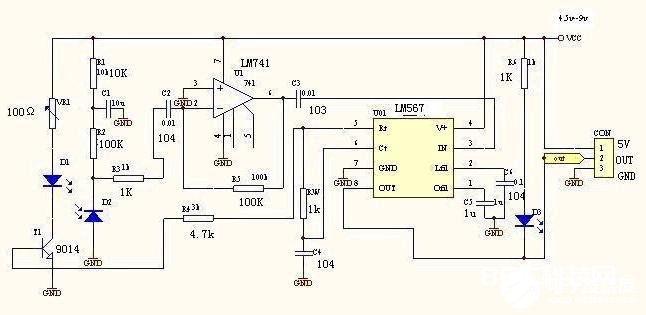
原理图
下面是作者自己的话:
当D2接纳到D1发射出经反射物反射的信号,D3发光,输出端U01(LM567)的8脚输出低电平。
本电路的最大持点是红外线发射部分不设专门的信号产生电路,而是直接从接纳部分的检测电路U01的5脚引人信号,此信号是U01锁相音频译码器的锁相中心频率,这样既简化了线路和调试作业,又避免了周围环境改动和元件参数改动对收发频率形成的差异,完成了红外线发射与接纳作业频率的同步主动盯梢,使电路的稳定性和抗搅扰才能大大加强。
本电路可多个用于同一设备而不会彼此搅扰,由于不同RW或C4的值U01译码器的中心频率不同,但中心频率不能大于500KHZ。调整VR可改动勘探间隔,留意勘探间隔要受反射面色彩的影响,这是红外线的特性决议,寻迹机器人用了此特性。
我用本电路多个和单片机89C2051改装玩具遥控车做成了避障机器人、避悬机器人、寻迹机器人,作用很好。并且寻迹机器人可寻多种色彩底(除黑色底外)的黑线或黑底的多种色彩线(除黑线外)。我想还可做成沿墙边走机器人、盯梢机器人等,还可用于其它方面的主动控制中。