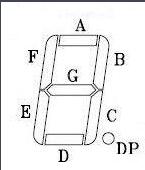
一、什么是数码管
数码管,也称作辉光管,是一种能够显现数字和其他信息的电子设备。玻璃管中包含一个金属丝网制成的阳极和多个阴极。大部分数码管阴极的形状为数字。管中充以低压气体,一般大部分为氖加上一些汞和/或氩。给某一个阴极充电,数码管就会宣布色彩光,视乎管内的气体而定,一般都是橙色或绿色。
虽然在外观上和真空管类似,其原理并非为加热阴极放射电子。因而它被称为冷阴极管或霓虹灯的一个变种。在室温下,即便处于极点的室内作业条件下,这种管子的温度很少超越40℃。
数码管的最常见方法有10个阴极,形状为数字0到9,某些数码管还有一个或两个小数点。但是也有其他类型的数码管显现字母、符号和符号。如一种“数码管”,其阴极为一个模板制成的面具,上面有数字形状的孔。一些俄罗斯的数码管,如IN-14,运用倒竖的数字2代表5,大约是为了节约生产成本,而没有显着的技能或美学方面的原因。俄罗斯的数码管大部分都运用了倒竖的2作为5。
将170伏的直流电压加在阴极和阳极之间,每一个阴极能够宣布氖的的红橙色光。因为混合气体的不同,不同类型的数码管之间的色彩有所区别。寿数较长的数码管在制作中加入了汞,减少了溅射,成果宣布的光的色彩为蓝色或紫色彩。在某些情况下,这些色彩被玻璃上的赤色或橙色过滤涂层过滤。

数码管分类
数码管也称LED数码管,不同职业人士对数码管的称号不相同,其实都是相同的产品。
按发光二极管单元衔接方法可分为共阳极数码管和共阴极数码管。共阳数码管是指将一切发光二极管的阳极接到一同构成公共阳极(COM)的数码管,共阳数码管在使用时应将公共极COM接到+5V,当某一字段发光二极管的阴极为低电平时,相应字段就点亮,当某一字段的阴极为高电平时,相应字段就不亮。共阴数码管是指将一切发光二极管的阴极接到一同构成公共阴极(COM)的数码管,共阴数码管在使用时应将公共极COM接到地线GND上,当某一字段发光二极管的阳极为高电平时,相应字段就点亮,当某一字段的阳极为低电平时,相应字段就不亮。
驱动方法
概述
数码管要正常显现,就要用驱动电路来驱动数码管的各个段码,然后显现出咱们要的数字,因而依据数码管的驱动方法的不同,能够分为静态式和动态式两类。
静态显现驱动
静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或许运用如BCD码二-十进制译码器译码进行驱动。静态驱动的长处是编程简略,显现亮度高,缺陷是占用I/O端口多,如驱动5个数码管静态显现则需求5&TImes;8=40根I/O端口来驱动,要知道一个89S51单片机可用的I/O端谈锋32个,实践使用时有必要添加译码驱动器进行驱动,添加了硬件电路的复杂性。
动态显现驱动
数码管动态显现接口是单片机中使用最为广泛的一种显现方法之一,动态驱动是将一切数码管的8个显现笔划“a,b,c,d,e,f,g,dp”的同名端连在一同,别的为每个数码管的公共极COM添加位选通操控电路,位选通由各自独立的I/O线操控,当单片机输出字形码时,一切数码管都接收到相同的字形码,但究竟是哪个数码管会显现出字形,取决于单片机对位选通COM端电路的操控,所以咱们只需将需求显现的数码管的选通操控翻开,该位就显现出字形,没有选通的数码管就不会亮。
经过分时轮番操控各个数码管的的COM端,就使各个数码管轮番受控显现,这便是动态驱动。在轮番显现过程中,每位数码管的点亮时刻为1~2ms,因为人的视觉暂留现象及发光二极管的余辉效应,虽然实践上各位数码管并非一起点亮,但只需扫描的速度足够快,给人的形象便是一组安稳的显现数据,不会有闪耀感,动态显现的作用和静态显现是相同的,能够节约很多的I/O端口,并且功耗更低。
二、74hc164简介
74HC164、74HCT164 是高速硅门 CMOS 器材,与低功耗肖特基型 TTL (LSTTL) 器材的引脚兼容。74HC164、74HCT164 是 8 位边缘触发式移位寄存器,串行输入数据,然后并行输出。数据经过两个输入端(DSA 或 DSB)之一串行输入;任一输入端能够用作高电平使能端,操控另一输入端的数据输入。
74HC164设备特性
门控串行数据输入 异步中心复位 契合 JEDEC 规范no. 7A 静电放电(ESD)维护
·HBM EIA/JESD22-A114-B 超越2000
V·MM EIA/JESD22-A115-A 超越 200 V 。多种封装方法额外从 -40 °C 至 +85 °C 和 -40 °C 至 +125 °C
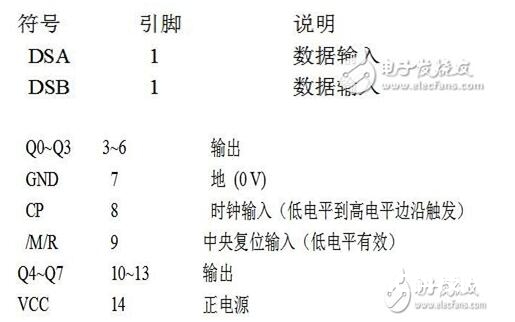
74HC164引脚阐明
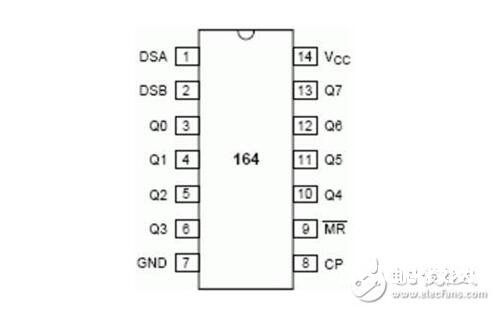
74HC164引脚图
74hc595引脚阐明
74HC164极限参数
直流电压 VDD:l-0.5V——7V
输入钳位电流 :-20MA—20MA
输出钳位电流 :-20MA—20MA
接连输出电流:-25MA—25MA
经过VCC 或GND的电流:-50MA—50MA
引脚焊接温度:+265度
三、74hc164驱动操控16个数码管程序
#include 《stc.h》
#include “intrins.h” //_nop_();延时函数用
#define uchar unsigned char
#define uint unsigned int
//================18b20数据口界说===============
uint temp; // 界说一个16位变量用于COPY数据
sbit DQ = P2^6;
char flash,presence;
uint temp1,temp2; //读出温度暂放
uchar s1,s2,s3,s4; //显现单元数据,共6个数据和一个运算暂用
//=======164端口界说==========
sbit ge=P2^5; //个位
sbit shi=P2^4; //十位
sbit bai=P2^3; //百位
sbit qian=P2^2; //千位
sbit clk=P2^1; //164时钟线
sbit data1=P2^0; //164数据线
sbit a0=ACC^0; //累加器
uchar code LED[10]={ //不带小数点的代码表
0xC0,0xF9,0xA4,0xB0,0x99,
0x92,0x82,0xF8,0x80,0x90,};
uchar code led1[10]={ //带小数点的代码表
0x40,0x79,0x24,0x30,0x19,
0x12,0x2,0x78,0x0,0x10,};
//======164数据转化程序=======
void chuanshu164(uchar data_buf)
{
uchar i;
ACC=data_buf; //数据送累加器
for(i=8;i》0;i–)
{
clk=0;
data1=a0;
clk=1;
ACC=ACC》》1;
}
clk=0;
}
/*****************延时函数*************************/
void delay(uint t)
{
for (;t》0;t–);
_nop_();
}
//========显现4位数码管函数===========
void xianshi(uint shu)
{
uchar ss;
for(ss=10;ss》0;ss–)
{
uint wei1,wei2,wei3,wei4;
wei1=shu/1000; //将千位别离
wei2=shu%1000/100; //将百位别离
wei3=shu%100/10; //将十位别离
wei4=shu%10; //将个位别离
chuanshu164(led[wei1]); //显现第一位数码管
qian=0;
delay(200);
qian=1;
chuanshu164(led[wei2]); //显现第二位数码管
bai=0;
delay(200);
bai=1;
chuanshu164(led1[wei3]); //显现第三位数码管
shi=0;
delay(200);
shi=1;
chuanshu164(led[wei4]); //显现第四位数码管
ge=0;
delay(200);
ge=1;
//}
}
}
//=================18b20相关函数开端==============
/****************DS18B20复位函数************************/
ow_reset(void)
{
char presence=1;
while(presence)
{
while(presence)
{
DQ=1;_nop_();_nop_(); //从高拉倒低
DQ=0;
delay(550); //550 us
DQ=1;
delay(66); //66 us
presence=DQ; //presence=0 复位成功,持续下一步
}
delay(500); //延时500 us
presence=~DQ;
}
DQ=1; //拉高电平
}
/****************DS18B20写指令函数************************/
void write_byte(uchar val) //向1-WIRE 总线上写1个字节
{
uchar i;
for(i=8;i》0;i–)
{
DQ=1;_nop_();_nop_(); //从高拉倒低
DQ=0;_nop_();_nop_();_nop_();_nop_(); //5 us
DQ=val&0x01; //最低位移出
delay(66); //66 us
val=val/2; //右移1位
}
DQ=1;
delay(10);
}
//
/****************DS18B20读1字节函数************************/
uchar read_byte(void) //从总线上取1个字节
{
uchar i;
uchar value=0;
for(i=8;i》0;i–)
{
DQ=1;_nop_();_nop_();
value》》=1;
DQ=0;_nop_();_nop_();_nop_();_nop_(); //4 us
DQ=1;_nop_();_nop_();_nop_();_nop_(); //4 us
if(DQ)value|=0x80;
delay(66); //66 us
}
DQ=1;
return(value);
}
/****************读出温度函数************************/
read_temp()
{
ow_reset(); //总线复位
write_byte(0xcc); //发指令
write_byte(0x44); //发转化指令
ow_reset();
delay(1);
write_byte(0xcc); //发指令
write_byte(0xbe);
temp1=read_byte(); //读温度值的低字节
temp2=read_byte(); //读温度值的高字节
temp=(temp2*256+temp1)*0.625;
return temp; //回来温度值
}
//=================18b20相关函数完毕==============
//=================主函数=========================
void main(void)
{
ow_reset(); //开机先转化一次
write_byte(0xcc); //Skip ROM
write_byte(0x44); //发转化指令
while(1)
{
xianshi(read_temp());
//xianshi(read_temp());
//xianshi(read_temp());
//delay(500);
}
}