


在美国,抽血师每年大约要抽血14亿次。这是运用的最为广泛的医学临床手法。跟着一代人的变老,每年的抽血查看次数也会更多。一次性的准确度依赖于患者的生理机能和医师的经历。人类的准确度估量大约在50%左右。这并不高,特别假如你是一个很难找到静脉的人。

VenousPro的原型规划提出了三个首要应战:
• 首要,设备需求是安全的,这意味着可重复性和确定性的履行
• 其次,设备需求高便携性,以便在临床环境下大范围运用。
• 最终,体系需求经过FDA严厉的评价
首套原型编程运用MathWorks的MATLAB完结。跟着VenousPro规划愈加杂乱和工程团队的扩增,VascuLogic意识到他们需求一个更集成的开发渠道。公司提出申请而且收到了国家仪器(NI)的医用设备立异基金,一起还赞同定制NI硬件,LabVIEW和NI培训和认证项目。VascuLogic运用国家仪器的CompactRIO 可重装备的监控体系来操控机器人,制作了第二代VenousPro原型。
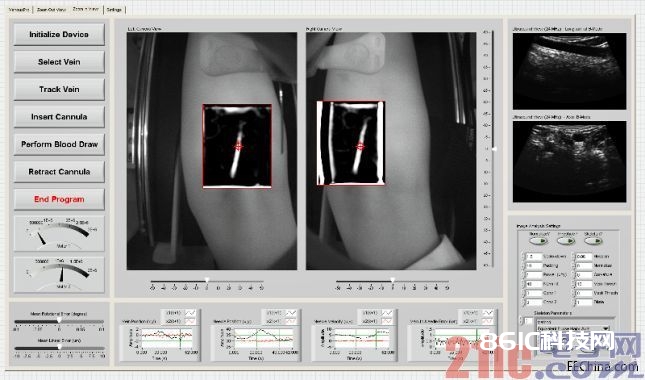
两个增强灵敏度的近红外GigE vision的摄像头和一个超声波探针为CompactRIO操控器供给了印象信息。一块 Xilinx Spartan-6 FPGA完成了图画流水线。图画处理流水线运用了NI视觉开发模块的先进的算法,图画中提取的3D方位和速度信息以每秒20帧与CompactRIO运动操控模块通讯。CompactRIO体系指挥机器针的机械手。
VenousPro设备的中心含有NI CompactRIO-9025实时操控器的5个I/O模块,其间4个 NI 9514 C系列带有编码反应模块的伺服驱动接口指挥4自由度的微型机器手,1个NI 9401 C系列数字I/O模块供给了双向通讯的8个通道。
公司将MATLAB代码转换成LabVIEW可视化规划并开发了直观的用户界面。VenousPro设备运用了NI LabVIEW的机器人模块里的的运动学、PID和道路规划VI,例如用针尖的3D笛卡尔坐标相关 机器人臂的关节角。它还运用了LabVIEW操控规划和仿真模块,依据当时卡尔曼滤波后的速度散布,来猜测未来的方位。经过运用LabVIEW Multicore Analysis和Sparse MatrixToolkit,加快大型矩阵的杂乱的数学运算。
本来第二个原型的开发方案有3个月的开发周期,但只花了3周由于LabVIEW环境的灵活性和模块化规划。因而,VascuLogic超前完结了人前、体外、概念证明的测验。
迄今,VascuLogic现已证明在多个体外研讨下超越98%的一次性准确率。公司计划升级到新的多核CompactRIO硬件,将用户界面引进NI触摸板,撤销PC主机。在NI渠道上开发,VascuLogic可以提早五个月以低于预算$50,000的价格交给设备,以供临床测验。
留意:VascuLogic的Alvin Chen和Max Balter将这个项目提交给2014 NI工程影响力奖评选。它在机器操控组中取胜。它还获得了NI社区挑选奖和NI的人道主义奖。






