


跟着电子产品的快速开展,“智能东西”越来越普及化。智能清洁东西也为人们的日子带来了很大的便当。传统的清洁东西功用相对比较单一,只能吸尘,或只能拖地,且基本是手动的,运用起来比较吃力。本文规划的多功用智能环保小车可分为以下几个部分:无线遥感模块、避障模块、寻光模块、红外对射模块、稳压模块、降压模块、电机驱动模块。它可完成浇水、拖地、风干、主动避障等多种功用,并且比较节能。
电机驱动模块
选用步进电机操控悬挂物体的精确运动,步进电机不需要运用传感器就能精确定位,但其驱动能有限,故不适合驱动小车。因而,可选用低内阻大电流的四直流电机,其速度相应较好,可认为小车的行走及其他功用更好地供给动力。运用四直流电机模块驱动小车能够完成对小车转向、直行和倒车的操控。图2 所示为四直流电机驱动模块原理图。
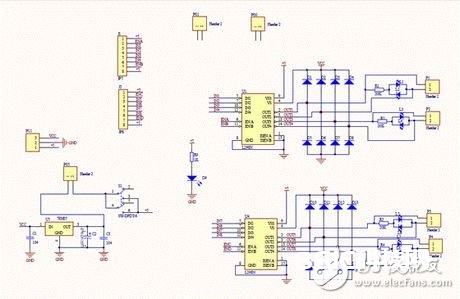
图2 四直流电机驱动原理图
避障模块电路规划
小车车头处装有三个红外传感器,小车在跋涉时红外传感器发射出红外线,红外线遇到前方的障碍物时会产生漫反射,反射信号被红外传感器接收到今后再传递给单片机,然后通过单片机操控小车做出相应的反响。三只红外传感器别离置于小车前端,不只方向与小车的前进方向平行,并且对小车与障碍物的相对间隔和方位能作出较为精确的判别。图3所示为红外避障模块的原理图。
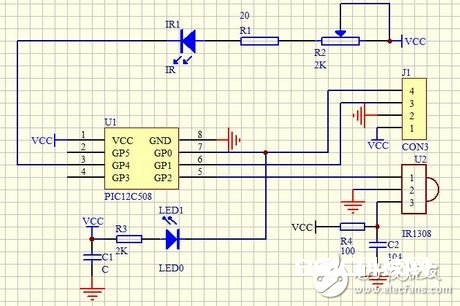
图3 红外避障模块原理图
红外对射模块
本红外对射模块主要由电压比较器LM393和对射式红外头组成,作业电压为5V。该模块用于检测升降设备的状况[4]。该模块对设备的灵敏度要求较低,用于本智能小车更有利于程序操控[5-6]。图4所示为红外对射模块原理图。
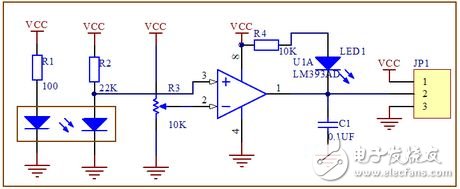
图4 红外对射模块
本规划选用AT89C52单片机作为操控中心体系,规划了一种避障、浇水、拖地、风干为一体的智能环保清洁小车。小车包括了清洁地上体系、供水体系和升降设备等,小车中的水泵完成了浇水功用,车底安装了升降海绵,车尾安装了鼓风机以完成拖地风干功用。小车可在遥控形式、主动形式、主动寻光充电三种形式下作业,完成了多功用操控,并给出了硬件电路规划流程。通过实践测验,能够完成一切功用,且功用安稳。小车能够在遥控、主动、主动寻光充电三种形式下作业,然后表现了它的智能化。与传统清洁小车比较,其功用更完善,且运用起来更便利。通过实践测验,小车完成了一切预期的功用,且能到达预订方针。






