


第4章电子负载操控器的规划
前面内容论说了电子负载的全体结构和各部分的软硬件功用,电子负载的中心操控电路是信号板上MOSFET负载电流环,其意图在于实时检测输入电压,调整负载电流。因而,本章对电子负载的负载电流的操控技能来论述。
首选工程上广泛运用的PI操控器作为电子负载的数字操控器,然后针对其缺乏,分别对积分别离PID操控器和抗积分饱满PID操控器,进行了研讨和仿真测验,为进一步处理PI操控器的鲁棒性差和精度不高的问题,规划了自适应含糊PID操控器,运用含糊数学的基本理论和办法,把含糊操控规矩有关的信息(如点评目标、初始实验PID参数等)存入知识库中,使体系的能够依据实践的呼应情况,运用含糊推理,主动完成对PID参数的最佳调。
4.1电子负载数字操控计划简介
电子负载的数字化与智能化的关键在于操控电路的模块数字化和操控功用软件化,功能微弱价格低廉的DSP的呈现,数字化技能而得到飞速的开展,使得杂乱的操控办法能够经过软件的办法完成,数字操控也成为运用操控理论的必定途径,林林总总的反响操控办法也被相继用于改进电子负载的瞬时和稳态呼应,就现在运用较多的数字操控办法介绍如下:
(1)PID操控,是最早开展起来的操控战略,因为其算法简略、鲁棒性好及牢靠性高,广泛的用于进程操控和运动操控,特别适用于树立准确数学模型确实定性体系。实践的非线性时变体系,使惯例的PID操控器难以到达抱负的操控效果,所以需求引进先进的PID操控,如数字PID操控、含糊PID操控、专家PID操控等等。
(2)迟滞操控,是一种以差错比较为根底的边边操控(band-band)体系,依据差错的正负发生的最大批改信号。这种操控办法的长处是简略并不需求知道被控目标的动态模型,缺陷是开关频率难以把握,且在相同频率下涟波较大。
(3)死击操控,数字体系也能够说是取样数据操控体系,也便是说,每隔固定一段时间,操控体系就会依据指令与反响核算出恰当的操控信号。死击操控规划进程清晰、办法简明,能够敏捷减低差错,可是有必要把握被控目标的动态特性,并且其操控能量会随取样的周期缩短而骤增。
(4)重复操控,运用操控器长期累积的差错信息来按捺外界的搅扰所发生的差错的体系,该操控办法将反响操控的立足点由瞬间改动量的按捺延伸到长期的稳态差错消除,可在体系在不可知的扰动下,输出值敏捷滑润的保持在设定值邻近,对操控精度的进步有很大的好处。缺陷在于需求考虑体系的安稳性和收敛速度,重复操控在消除剧烈的负载改动情况时,简略构成体系的安稳度减低。本课题的研讨中首要选用了依据DSP的数字PID操控算法,其完成框图如图4.1所示。

DSP在电子负载中充当了PID操控器的人物,数字PID操控是经过DSP内部的程序来完成的,因而它的灵活性很大,一些本来模仿PID操控器中无法完成的问题,在DSP的软件里都能够得到处理,所以能够发生一系列的改进算法,构成非标准的操控算法,来改进体系的质量,满意操控体系的需求。
4.2依据PID操控战略研讨
在工程实践中,运用最为广泛的份额、积分、微分操控简称PID操控,又称PID调理,它以其结构简略、安稳性好、作业牢靠、调整便利而成为工业操控的首要技能之一。将误差的份额(P)、积分(I)和微分(D)经过线性组合构成操控量,用这一操控量对被控目标进行操控,这种操控器便是PID操控器。传统的模仿PID操控都是运用在接连时间操控体系,如下图4.1所示。
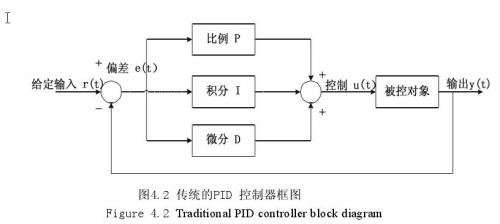
图4.2中r(t)是电流没定值,y(t)电子负载的实践丈量值,e(t)是输入操控器的误差信号,u(t)是操控器输出的操控量,则PID操控算式如下式(1)所示:
其间:KP是份额系数,T1是积分时问常数,TD是微分时问常数。
(1)增量式PID操控算法
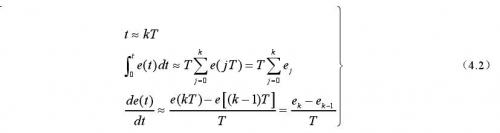
上式是模仿方式的PID操控算式,现在选用TMSLF2812完成数字PID操控,DSP操控是一种采样操控,它只能依据采样使可得误差核算操控量,而不能像模仿操控那样接连的输出操控量,进行接连操控,上式中的积分和微分项不能直接运用,有必要进行离散化处理。离散化处理的办法为:以T作为采样周期,K作为采样序号,则离散采样时间KT对应接连时间t,用求和的方式替代积分,用增量的方式替代微分,可作如式4.2所示改动。
将上式代入4.1式中就可得离散的PID表达式:

假如采样周期取的满足小,则以上的近似核算可获满足的准确成果,离散操控进程与接连操控进程非常挨近。为添加操控体系的牢靠性,选用增量式PID操控算式,即让TMSF2812只输出操控量的增量△u(k)。式4.3是第k次PID操控器的输出量,那么第k-1次PID操控器的输出所以增量式PID操控算式如式4.4所示:
4.3式和4.4式相减得方程4.5便是本操控程序中用到的增量式PID操控算式: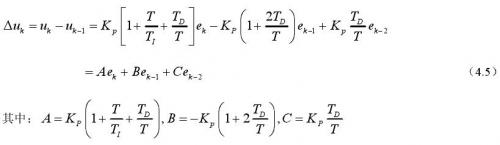
由式4.5能够看出,假如依据DSP电子负载操控体系选用稳定的采样周期T,一旦确认了A、B、C,只需前后三次丈量的误差,就可求出操控量。增量式PID操控与方位式PID操控比较仅是算法上有所改动,它仅仅改动输出增量,并且操控的增量仅与最近的采样有关,这样减少了DSP误操作时对操控体系的影响,并且不会发生积分失控[29]。下图4.3是数字PID操控Simulink模块图。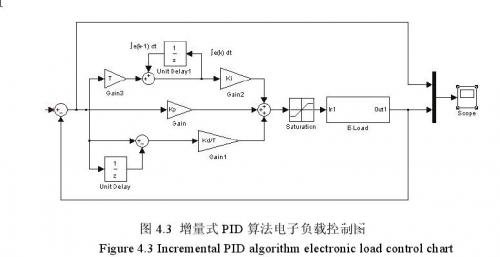
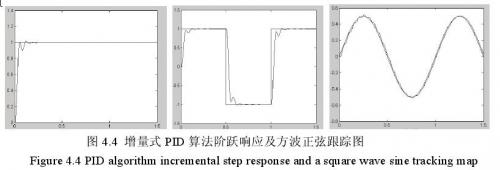
选用增量式数字PID算法的电子负载,阶跃呼应,方波和正弦盯梢如图4.4所示
(2)积分别离PID操控算法
积分环节的运用是为了消除静差,进步操控精度。可是进程的发动、完毕或大幅度的增减设守时,短时间内体系输出有很大的误差,会构成PID运算的积分堆集,致使操控量超越电子负载执行机构或许答应的动作规模最大值,有或许引起体系较大的超调,乃至引起体系较大的振动,在调试进程是不答应的。
积分别离的思路是,当被控量与设定值误差较大时,撤销积分效果;当被控量挨近给定值时,引进积分操控。首要依据所规划电子负载实践情况,以为设定个阈值,恒流形式下,设定阈值ε=0.4(低档位)/3(高档位);恒压形式下,设定阈值ε=4(低档位)/15(高档位)。其次,当|error ( k )|>ε时,选用PD操控,可防止发生过大的超调量,又可使体系有较快的呼应。|当error ( k )|≤ε,选用PI操控,以确保体系的操控精度。
积分别离操控算法可表示为:
式子4.6中,T为电子负载操控环时间,β为积分项的开关系数
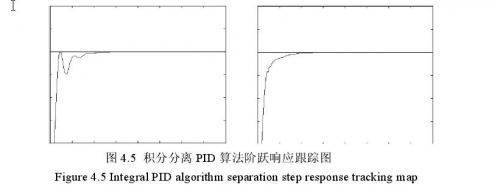
选用积分别离PID处理的电子负载,在阶跃呼应,方波和正弦盯梢仿真如图4.5所示。由由仿真成果可知,选用积分别离法,在阶跃呼应大幅增减时,撤销积分效果,消除了对误差的堆集,减少了不必要的振动,体系的安稳性有了很大的进步。
(3)变积分PID操控算法
在一般的PID操控算法中,因为积分系数是常数,所以在整个操控进程中,积分增量不变。而体系对积分项的要求是,体系误差大时积分效果应削弱乃至全无,而在误差小时则应加强。积分系数取大了会发生超调,乃至积分饱满,取小了又迟迟不能消除静差。因而,怎么依据体系误差巨细改动积分速度,关于进步体系质量是很重要。变速积分PID可较好的处理这一问题。变速积分PID的基本思路是,设法改动积分项的累加速度,使其与误差巨细相对应:误差越大,积分越慢;反之则越快。
积分饱满是指体系存在一个方向的误差,PID操控器的输出因为积分效果的不断累加而加大,然后使执行机构到达极限方位,若操控器输出持续增大,体系的输出超越正常运转的规模而进入饱满区。进入饱满区越深则退出饱满区所需的时间愈长。此刻若执行机构不能随误差反向做出相应的改动,体系就会像失掉操控相同。
是变积分PID算法相同能够防止积分饱满的办法。在电子负载体系核算输出量时。核算u(k)时,首要考虑上一时间的输出操控量是否现已超越了约束的规模。
若超越执行机构最大值若u(k-1)> umax,则只累积负误差,若没有超出最大值,u(k-1)< umax则堆集正误差,然后防止操控量长期停留在饱满区。
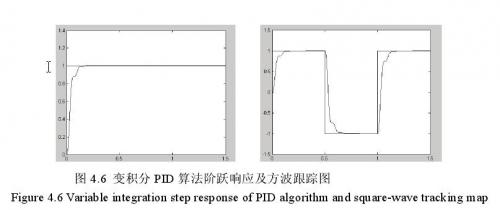
选用变积分PID算法处理的电子负载,阶跃呼应,方波盯梢如图4.6所示。
(4)参数的整定
归纳起来有两大类:一是理论核算法,依据体系的数学模型,经过理论核算确认操控器参数。树立模型不只困难,其间的很多简化也使模型失真,脱离实践情况,即便得到模型,这种办法所得到的核算数据未必可用。二是工程整定办法,它首要依靠工程经历,直接在操控体系的实验中进行,且办法简略、易于把握,工程运用中被广泛选用。
PID操控器参数的工程整定办法,首要有临界份额法、反响曲线法和衰减法。三种办法各有其特色,其共同点都是经过实验,经过闭环运转或模仿,调查体系的呼应曲线,然后依据各参数对体系的影响,凑试不同的参数直至呈现抱负的呼应曲线。






