摘要:针对同一轨迹上列车防撞预警,选用GPS卫星定位和航迹计算完成组合定位,经过无线数传技能,可用于杂乱轨迹地舆环境(地道、森林、丘陵等)下的局域铁路网行车安全办理。试验测验标明体系能够满意运用要求。
0 导言
磕碰防止问题是现代交通运输范畴的重要研讨问题,与人们的日子休戚相关,在航空、帆海、路途以及轨迹交通范畴均有许多的研讨。如航空范畴中的交通预警和避撞体系/自决议计划监督播送体系TCAS/ADS—B;帆海范畴中的船只主动识别体系AIS;路途交通范畴的车-车避撞体系C2C等。
路途交通、航空以及帆海等范畴都已经有了较为老练的防撞预警体系,相比之下,轨迹交通范畴的防撞预警体系研讨起步较晚,开发实践难度也较大。本文首要针对低速运转的货运列车在杂乱的轨迹地舆条件(地道、森林、丘陵等)下运转,合理运用单片机技能、GPS卫星定位技能和航迹计算导航算法,规划出低成本的铁路列车防撞体系。
1 体系整体介绍
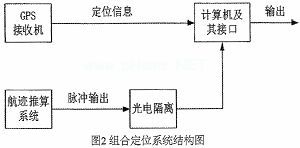
列车防撞预警体系由定位体系、无线通信机制、决议计划体系以及报警装置等部分组成。其体系结构图如图1所示。
体系启动后,首要将本身信息(实时方位、实时速度等)播送到邻近区域,一起接纳所在区域中的其他装有该体系的播送信息。列车经过这些从其他列车接纳到的信息,能够全面了解现在邻近的交通状况,若存在发生风险的或许则当即向列车员供给正告和主张,然后防止磕碰事端的发生。因而,该防撞预警体系首要有三个功用:①方位、速度等相关信息的获取;②播送并接纳这些相关信息;③对这些信息进行处理并检测是否存在磕碰风险,若存在则宣布报警信号。
2 组合导航体系
组合导航体系首要是为列车防撞预警体系供给牢靠的方位信息、列车的实时定位信息对列车操控与体系进行磕碰检测有至关重要的效果。
2. 1 GPS全球卫星定位体系
GPS(Global Position System,全球卫星定位体系)定位的基本原理是依据高速运动的卫星瞬间方位作为已知的起算数据,选用空间间隔交汇原理,确认待测点的方位。铁路上已开发老练的主动闭塞体系证明了GPS适用于列车定位,GPS定位不依赖于其他轨旁设备,只需一部高精度GPS终端接纳机便能完成惯例定位。可是GPS存在动态呼应能力差、易受电子搅扰、信号简单被遮挡等缺陷。假如GPS信号长时间不能得到及时康复,体系的差错就不可防止随时问而堆集。当列车行进在GPS信号欠好的地道、森林中时,朴实的卫星定位将不能满意体系要求。
2.2 DR航迹计算定位体系
DR(Dead Reckoning,航迹计算体系)是运用已知的载体初始方位,依据运动载体在该点的航向、航速和飞行时间,实时计算下一时间的坐标方位的一种导航定位办法。它是一种自主式定位,其定位精度不会遭到如电磁搅扰、遮挡等外界要素的影响。可是,航迹计算体系不具有长时间的稳定性,有必要每隔一段时间进行差错校对。本体系所运用的航迹计算体系类似于车载路程仪,其结构和原理也大致相同,都是由一个磁电传感器和一组贴在车轮上的磁片构成,车轮每旋转一圈,磁电传感器便发生必定数量的脉冲,经过对这些脉冲的计数,便知列车在这段时间的行程,在时间的列车运转行程为

式中,n(t)为t时间输出的脉冲数:n(t)-n(t-1)即为本周期内的输出脉冲数;M为车轮每转一圈应该输出的脉冲数;D为车轮直径。
依据在t时间的列车运转行程,可得列车的运转速度为

式中,τ为计数周期,当计数周期较小时,该速度可近似描绘列车的瞬时速度。
2. 3 组合导航算法
当列车运转在地道等卫星信号欠好的情况下时,体系会主动记录下最终一个GPS输出的有用坐标,一起,DR体系以该点为坐标原点的地舆坐标系(一般取东、北、天坐标系,满意右手定则)作为航迹计算的参阅坐标系,并取该点为其计算方位的起点,运用航向传感器和DR体系可确认每一时间车辆的方位:

式中,x(t),y(t)是t时间列车在参阅坐标系下的方位;x(t-1),y(t-1)是t-1时间列车在参阅坐标系下的方位;θ是测向速度与参阅坐标系北向的夹角。在此,咱们将地道做一个合理地简化,在一般情况下咱们以为地道为直地道。所以,可依据体系记录下的最终一个GPS输出的有用坐标结合列车的实时方位进行航迹计算:
式中,λ(t)、L(t)分别为航迹计算过程中列车的实时经度和纬度;λ0、L0分别为起点经纬度。
3 硬件规划
3.1 组合导航模块
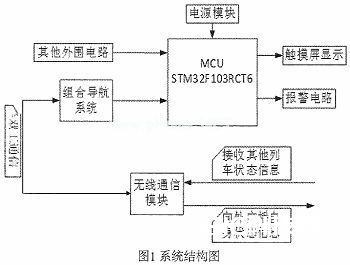
GPS定位具有长时间的稳定性,但定位不接连,航迹计算体系恰恰具有杰出的短期稳定性,但有必要每隔一段时间进行定位差错校对。可见GPS定位和DR具有很强的互补性,本体系便是选用了GPS/DR组合定位体系,经过DR定位差错补偿,保证了列车在GPS信号丢失时仍能有用地确认列车的实时方位。组合定位体系结构图如图2所示。