


小生境遗传算法的移动机器人途径优化技能
移动机器人途径规划是机器人学的一个重要研讨范畴,也是人工智能与机器人学的一个结合点。不论是哪种类别的移动机器人,都要求依据某一原则(如行走路线总长度最短,能量消耗最少等),在作业空间中沿一条最优(或次优)的途径行走。
途径规划的典型办法有图查找法、栅格法、人工势场法等,这些算法都有必定局限性,易堕入部分最优解,而遗传算法在处理非线性问题上具有杰出的适用性,已成为途径规划中运用较多的一种办法。可是规范的遗传算法本身也存在着早熟,易堕入部分最优解等缺陷,不能确保对途径规划上核算功率和可靠性的要求。为了进步途径规划的求解质量和求解功率,提出一种依据预挑选机制小生境技能的改善遗传算法,并将其运用于移动机器人的途径规划,选用化杂乱的二维坐标为一维坐标的编码办法,有用下降了遗传算法的查找空间;依据移动机器人的行走特色,规划了自习惯穿插算子、自习惯变异算子、刺进算子、删去算子、扰动算子和倒位算子。通过核算机仿真证明了改善后的遗传算法显着进步了查找功率和收敛速度,并能确保收敛到大局最优解,战胜了规范遗传算法的缺陷,为机器人快速寻求一条无碰的最优途径。
1 依据遗传算法的机器人途径规划算法的改善与运用
本文的移动机器人途径规划,方针是在一幅已知障碍物散布的二维地图上寻觅一条最优途径,使其抵达方针点的间隔最短,一起尽或许地使其与障碍物的间隔最大化。为了简化评论,将移动机器考虑为一个质点,而障碍物的鸿沟向外扩张,这是移动机器人的最大安全间隔。
1.1 依据预挑选机制技能的小生境遗传算法机理
因为简略遗传算法是一种随机的办法,旨在对多个不同的单个进行隐并行寻优,其运转进程和完结办法在本质上仍是串行的,这样的进化运算进程相对缓慢;一起,根本遗传算法常在各个单个未到达最优解之前就收敛于一个部分最长处,然后导致染色体趋于共同,即产生“早熟”现象。为了战胜这些缺乏,引入了小生境遗传机理,用依据预挑选机制技能的小生境办法坚持集体的多样性,避免集体内单个单个的很多添加,完结解空间内对部分最优解和大局最优解的寻优。
小生境技能便是将每一代单个划分为若干类,每个类中选出若干习惯度较大的单个作为一个类的优异代表组成一个种群,再在种群中以及不同种群之间,通过杂交、变异产生新一代单个群,一起选用预挑选机制完结挑选操作。依据这种小生境技能的遗传算法,可以更好地坚持解的多样性,一起具有很高的大局寻优才干和收敛速度。
在预挑选机制中,只要在子串的习惯度超越其父串的状况下,子串才干替换其父串,进入下一代集体。这种办法趋向于替换与其本身类似的单个(父与子之间的性状遗传),因而可以较好地坚持集体的散布特性,即便在集体规划相对较小的状况下,仍可坚持较高的集体散布特性。详细算法的完结进程如下:
(1)初始化(树立初始集体,确认遗传参数);
(2)核算单个的习惯度;
(3)遗传操作(挑选、穿插、变异);
(4)比较子串和父串的习惯度巨细,假如子串的习惯度高于父串的习惯度,就替换父串;不然坚持父串不变;
(5)假如没有满意算法的间断条件,则回来第(2)步;不然,算法间断。
1.2 途径编码
基因的编码办法确认了问题在遗传算法中的表现方法,也决议了所选用的遗传进化操作。每个染色体表明为给定符号会集的字符组成基因串。在前期的遗传算法中,符号集仅限于二进制数,因而遗传基因型是一个二进制符号串,其长处在于编码、解码的操作简略,穿插、变异等的遗传操作便于完结;缺陷是不方便反映所求问题的特定常识,以及对一些连续函数的优化问题等。因为遗传算法的随机特性使得其部分查找才干较差,关于一些要求多维、高精度的连续函数优化,二进制编码存在连续函数离散化时的映射差错,当单个编码串较短时,或许达不到精度要求;当单个编码串较长时,虽然能进步精度,但却会使算法的查找空间急剧增大。
实数编码适用于表明规划大、精度高的数,能有用地战胜二进制编码的海明山崖缺陷,且可直接选用真值编码,便于与问题相关的启示常识,可以进步算法的查找功率。移动机器人的途径可以视为一系列坐标点衔接而成的线段,对移动机器人的途径规划也便是对这些坐标点做各种操作,以使它们契合移动机器人行走的需求。考虑到移动机器人本身的特色(不只需求避开障碍物,还要确保途径的滑润性),以及移动机器人途径中转向点个数的不确认性,选用可变长染色体的实数编码办法,用实数直接对途径坐标点进行编码,以便于对途径点的灵敏操作,然后避免在运用二进制编码时,二进制位串与直角坐标点之间相互转化的繁琐操作,且易于进行遗传算子操作。
1.3 种群初始化
履行遗传算法的最优途径规划是有必要对种群进行初始化,因为初始途径随机产生,各转向点坐标或许散布在整个规划区域规划内,包含可行的和不可行的,这样便添加了查找规划。这儿在可行区域内约束初始转向点,以加速遗传算法的收敛速度。详细做法为:判别该转向点是否在可行区域内,假如不是,则从头选取,直到坐标点契合条件间断。
依据规划环境的杂乱度不同,最优途径中转向点的个数也是不确认的,一般来说,环境越杂乱,转向点就越多,因而算法选用变长编码技能,通过对染色体进行删去、刺进等操作,可以确认适宜的转向点个数,使途径到达最优。可是,转向点数目太多,占用资源也就会太大,它将使运算速度变慢。因而,在运算进程中,设定最大转向点为Nmax,种群中每个单个的长度n满意2≤n≤Nmax。
选用小生境原理,将每一代单个划分为若干类,每个类中选出若干习惯度较大的单个,作为一个类的优异代表组成一个种群。
1.4 习惯度函数
所谓移动机器人的途径规划,指在起点和结尾之间找出一条最短的可行途径,其约束条件是不与障碍物相交,一起移动机器人在行走中的转角不宜太大。该算法以两个条件作为规划途径的可行性点评函数,即途径总长度和各转向点角落的均匀巨细,关于不可行的途径,对其习惯度进行赏罚,使它的习惯度差于可行途径。
(1)途径总长度。为了避免移动机器人与障碍物磕碰,应尽量使其与障碍物坚持必定的安全间隔。假定移动机器人的安全半径为r;移动机器人与障碍物的间隔为d,则途径总长度Len由式(1)核算:

式中:d(pi-1,pi)为转向点pi-1与pi之间的长度。假如pi-1与pi之间的途径不可行,则运用赏罚函数法对其习惯度进行赏罚。赏罚函数界说如下:
式中:ε为赏罚因子。途径的点评函数可以写为:

判别两点之间的途径是否可行,只需判别这两点的连线与障碍物的各边是否相交即可。依据几何学原理,判别两条线段是否相交可由以下两个进程进行确认:快速排挤试验;跨立试验。鉴于文章篇幅,在此不再对这两个试验进行详细论述。
点评途径是求途径长度最短的问题,通过赏罚因子,可以使不可行途径变长,然后下降它的习惯值。
(2)途径滑润度。移动机器人的特色决议了它在行走进程中不宜以过大角落进行转向,因而整条行走途径应趋于陡峭而润滑,即每一转向点处的角落值应尽或许小。这儿假定角落最大值不能超越π/2,滑润度可以运用途径的均匀角落值来核算:
式中:ξ为一个趋于零的常数(ξ>0);αi(0≤αi≤π,i=2,3,…,n-1)表明两向量AC,CB之间的夹角,B,C点的坐标别离为(xi-2,yi-1),(xi,yi),(xi-1,yi-1);k为αi中大于或等于π/2的个数,即当某一夹角大于或等于π/2时,对习惯度进行赏罚。当n=2时,途径为起始点与间断点的连线。若其可行,则M值趋于0。可以看出,M值越小,途径的滑润度越好。
得到了以上两个条件的点评函数,就可以取得整条途径的习惯度函数。选用各项点评函数加权求和是常用的确认习惯度函数的办法。因为各个加权系数不是稳定不变的,而是随途径和障碍物的状况改变而改变的,所以这种状况下各个加权系数就很难调整和确认。因而,在确认习惯度函数时,尽量使习惯度函数的项数最少,但又有必要把途径规划的两个条件融合在遗传优化进程中。这儿选用点评函数相乘的方法,如式(6)所示。
f=1/(ML) (6)
以f作为挑选操作的依据,则途径的长度和均匀角落越小,其习惯度越好。
1.5 遗传算子
(1)挑选算子。运用锦标赛挑选法和精英保存法相结合的挑选战略。选用在锦标赛挑选法挑选时,先随机在集体中挑选K个单个进行比较,习惯度最好的单个将被挑选作为生成下一代的父体,参数K称为比赛规划。这种挑选办法能使种群中习惯度好的单个具有较大的“生计”时机。一起,因为它只运用习惯度的相对值作为挑选的规范,而与习惯度的数值巨细不成直接份额,然后避免了超级单个的影响,在必定程度上避免了过早收敛和阻滞现象的产生。精英保存法是当时种群中习惯度最好的单个,它不参与遗传操作,可直接复制到下一代,替换经穿插和变异操作产生的子种群中习惯度最差的单个,其长处是在查找进程中可以使某一代最优单个不被遗传操作所损坏,这样可确保遗传算法以概率收敛到最优解。经历证明,保存占种群整体2%~5%数量的单个,作用最为抱负。
(2)穿插算子。选用单点穿插法,在两个父体上别离随机选取一个穿插点(起点和结尾在外),交流两个单个在各自穿插点之后的染色体。考虑到规划途径的长度是可变的,为了避免穿插操作后呈现过于繁琐或简略的途径,对生成的新单个长度进行约束,即最大长度不能超越Nmax,而且不能产生回路,若不契合要求,从头获取两个父单个的穿插点。
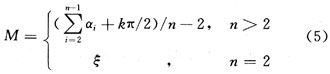
(3)刺进算子。规划了两种刺进算子。第一种是有针对性的,即在连线穿过障碍物的两个转向点之间刺进一个或多个转向点,使产生的途径避开障碍物,如图1(a)所示;第二种是一般含义上的刺进,以必定概率刺进一个随机产生的转向点,如图1(b)所示。
(4)扰动算子。相同规划了两种扰动算子,第一种只选取途径不可行的转向点来进行小规划的调整,使其途径可行,如图1(c)所示;第二种是不论途径是否可行,恣意选取一个方位,以概率pm对其转向点坐标进行调整。在进化初期,不可行的解数量较多,调整的规划大一些。在进化后期调整规划逐步缩小,如图1(d)所示。
(5)删去算子。树立一个存储空间REC,在一条途径中,假如点(xi-1,yi-1)与点(xi,yi)的连线通过障碍物,但(xi-1,yi-1)与(xi+1,yi-1)的连线不通过障碍物,则将点(xi,yi)添加到REC中。假如REC不为空,则从中随机选取一点删去(见图1(e));不然,在途径中恣意选取一个途径点,以概率pd进行删去,如图1(f)所示。
(6)滑润算子。滑润算子只对可行途径中最大的角落进行操作,如图1(g)所示。删去角落α的极点pj,顺次衔接点pj-1,p1,p2,pj+1构成可行途径段序列pj-1p1→p1p2→p2pj+1。
(7)倒位算子。随机选取途径中两个中心转向点,倒置之间的转向点。倒位算子可使途径产生急剧改变,关于转向点较多的途径会有活跃的含义。一般的穿插和变异算子不易取得此种作用,而且倒位算子能批改遗传进化进程中或许呈现的基因差错,如图1(h)所示。
1.6 遗传算子概率挑选
挑选适宜的遗传算子履行概率是遗传算法能否收敛到最优解的要害之一。在进化进程的前期,集体中存在很多的不可行解,因而穿插算子、扰动算子的概率应该取得较大些,而滑润算子取较小的概率;跟着进化进程的推动,可行解增多,应适当进步滑润算子的概率,以进步可行解的滑润功能。一起,为了避免穿插算子和扰动算子对可行解的损坏,需下降其履行概率,并取较小的扰动概率对可行解的形状进行微调。其间,扰动算子(1)和刺进算子(1)是对途径转向点的启示式操作,都是针对不可行途径的优化调整,关于这些算子应当一直挑选较高的概率。刺进算子(2)会使途径的转向点数量添加,应当取较小的概率。
1.7 间断条件
一般在对问题无知的状况下,可以在方针函数到达一个可以接受的规划内之后,即间断算法。别的,还可设置最大进化代数,在给定的进化代数之内强行间断算法,然后确保运算时刻的要求。为了有用起见,在此采纳最大进化代数间断原则,并选取习惯度最好的可行途径。
1.8 算法流程
改善后的依据小生境遗传算法流程如图2所示。详细算法描绘如下:
(1)初始化种群,沿起点和结尾连线方向等间隔选取N个点,在这些点的笔直线上随机选取转向点的纵坐标,而且使这些转向点不在障碍物内;
(2)将每一代单个划分为n个类,每个类中选出若干习惯度较大的单个,作为一个类的优异代表,组成一个种群。种群规划Gi(i=1,2,…,n+1);
(3)核算种群中所有单个的习惯度,将其最好的单个保存,然后选用锦标赛挑选法,挑选父单个,以履行穿插操作,而且查看取得的子代单个染色体长度是否超越N,假如没有超越,则保存,不然丢掉。
(4)以设定的概率对新产生的子代单个进行变异、刺进、扰动、删去、滑润的操作。此进程中,采纳预挑选机制,比较子串和父串习惯度的巨细,假如子串的习惯度高于父串的习惯度,就替换父串;不然坚持父串不变;
(5)重复第(3)和第(4)步直到取得的新单个数量与父代集体数量持平;
(6)用保存的上一代最优单个替换新种群中习惯度最差的单个;
(7)查看算法间断条件。契合则间断,不然跳转至第(3)步,算法继续进行。
2 仿真
移动机器人最优途径规划规划的环境信息首要包含移动机器人活动区域内的各种障碍物信息辨认。本文视各种障碍物都为不可行区域,并以恣意形状的多边形来表明。在VC 2005环境中,对以上算法进行仿真。选取算法参数为途径最大转向点数30,初始转向点数20,种群巨细100,锦标赛规划取5,最大进化代数G=80。在算法的前20代中,穿插概率pc=0.6,扰动概率pm=0.6,刺进算子2pi=0.6,滑润算子概率ps=0.1;在20代今后pc=0.1,pm=0.2,pi=0.01,ps=0.7。
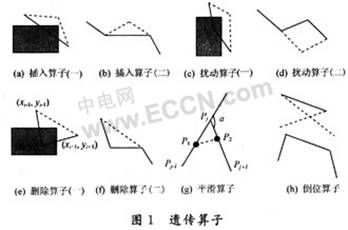
在算法的初始阶段,因为转向点较多,因而删去概率应当取大一些,这样可以使转向点数量削减,然后缩小途径的长度;但在算法后期,途径点现已较少,再运用较大的删去概率,简略使算法堕入部分解,且收敛到最优解的概率大大削减,因而进化后期的删去概率应削减,确保途径的多样性。初始删去概率选0.8,大约20代今后,选取0.1,而扰动算子1和刺进算子1的概率一直为0.8。选取两种不同的环境(见图3),别离运转上述算法各10次,选出作用最好的途径显现在图3(a)、图3(b)中。从图3中可以看出,改善后的遗传算法对各种环境都有杰出的习惯性。其间,图3(a)的状况最简略,只用了19代就得到了最优成果;图3(b)进化了36代后;收敛到最优解。
为了与规范遗传算法的功能进行比照,别离运用本文算法和规范遗传算子对环境一和二进行试验。规范遗传算法的挑选选用锦标赛挑选法,其穿插概率、变异概率与本文算法相同,运转成果如表1和表2所示。
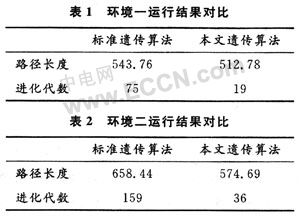
从表1,表2中数据可以看出,不论是运转时刻,仍是收敛的途径长度,本文算法都优于规范遗传算法。首要是因为本文算法针对规划途径有针对性地规划了新的遗传算子,然后加速了进化的速度,更简略收敛到最优解。
3 结 语
选用依据预挑选机制的小生境技能,且依据启示式常识来规划遗传算子。对规范遗传算法进行了改善和扩大,并运用于移动机器人行走的途径规划。该算法一起统筹了遗传进化的快速性和集体的多样性,有用地按捺了“早熟”现象的产生,能很好地查找部分最优解和大局最优解。试验证明,该算法在不同的环境中都可以在较小的进化代数内收敛到最优解,算法的履行速度和成功率显着高于规范的遗传算法。别的,在进化的不同阶段选取适宜的穿插和变异概率关于进化成果有着要害性的影响,本文将算法分成了两个阶段,别离设定了不同的遗传操作概率,这种办法还比较简略,不能彻底习惯种群的改变状况。怎么让算法依据种群进化状况主动调整和优化这些参数,还需进一步的研讨和改善。
.






