


车速路程表是由指示轿车行进速度的车速表和记载轿车所行进过间隔的路程计组成的。现在有机械式和电子式两种。
一、车速路程表的信号设备
(一)机械式车速路程表
传统的车速路程表是机械式的,他的驱动轴另一端制成方头,通过软轴和变速器上的路程表被迫齿轮衔接在一同。路程表被迫齿轮旋转带动软轴内钢丝旋转,钢丝带动车速路程表的驱动轴旋转,使车速路程表作业。从他的信号设备能够看出,车速表指针的旋转和路程计数器的累计都和路程表被迫齿轮的旋转方向有关,因而在规划中必定要留意路程表被迫齿轮的旋向。
跟着电子技能的开展,传统的机械式车速路程表遭到史无前例的应战。软轴在高速下旋转,其运动的迟滞性及遭到钢丝交变应力极限的约束,高速行进的车辆常常形成钢丝软轴疲惫开裂,从而使车速路程表功用失效。一同,也会由于软轴安置过长形成其形变过大或运动迟滞现象,导致指示愚钝或过错指示。别的,由于整车安置计划不同,不同车型要求有相应规范的软轴,由于钢丝在软轴中的弹性和冲突以及衔接方轴的磨损,都将使外表指针的指示稳定性遭到影响。因而,电子车速路程表愈来愈被广泛应用。
(二)电子车速路程表
电子车速路程表的信号设备分为两种,一种是通过电线束和装在路程表被迫齿轮上的电子路程表传感器衔接在一同,咱们称这种电子路程表传感器为触摸式电子路程表传感器,见图1所示。
一、车速路程表的信号设备
(一)机械式车速路程表
传统的车速路程表是机械式的,他的驱动轴另一端制成方头,通过软轴和变速器上的路程表被迫齿轮衔接在一同。路程表被迫齿轮旋转带动软轴内钢丝旋转,钢丝带动车速路程表的驱动轴旋转,使车速路程表作业。从他的信号设备能够看出,车速表指针的旋转和路程计数器的累计都和路程表被迫齿轮的旋转方向有关,因而在规划中必定要留意路程表被迫齿轮的旋向。
跟着电子技能的开展,传统的机械式车速路程表遭到史无前例的应战。软轴在高速下旋转,其运动的迟滞性及遭到钢丝交变应力极限的约束,高速行进的车辆常常形成钢丝软轴疲惫开裂,从而使车速路程表功用失效。一同,也会由于软轴安置过长形成其形变过大或运动迟滞现象,导致指示愚钝或过错指示。别的,由于整车安置计划不同,不同车型要求有相应规范的软轴,由于钢丝在软轴中的弹性和冲突以及衔接方轴的磨损,都将使外表指针的指示稳定性遭到影响。因而,电子车速路程表愈来愈被广泛应用。
(二)电子车速路程表
电子车速路程表的信号设备分为两种,一种是通过电线束和装在路程表被迫齿轮上的电子路程表传感器衔接在一同,咱们称这种电子路程表传感器为触摸式电子路程表传感器,见图1所示。
当轿车行进时,路程表被迫齿轮驱动电子路程表传感器内的磁钢作圆周运动,磁钢每转一周,电子路程表传感器就输出N个(一般为8个或10个)脉冲信号,经衔接线束传给车速路程表。他与机械式车速路程表比较,最主要是用传感器替代了软轴,克服了机械式车速路程表指针摇摆,软轴易断的缺陷,被广泛应用在国内商用车职业。
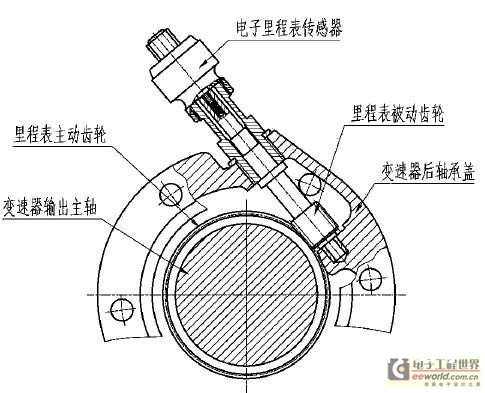
另一种是通过电线束和装在变速器后轴承盖上的电子路程表传感器衔接在一同,咱们称这种电子路程表传感器为非触摸式电子路程表传感器,见图2所示。
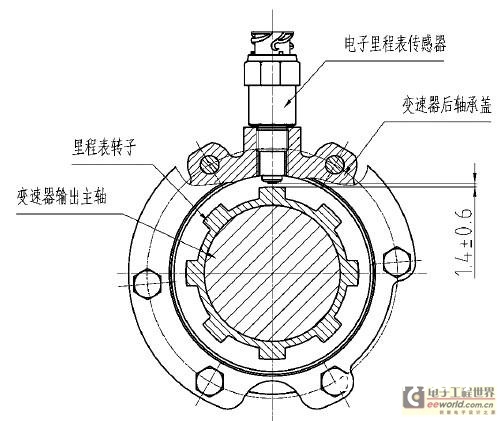
传感器探头与路程表转子之间有必定的空隙,这个空隙一般控制在1.4±0.6mm。当轿车行进时,路程表转子与变速器输出主轴一同翻滚,当路程表转子的某一个齿翻滚到传感器探头对应的方位时,探头中的灵敏器材遭到路程表转子磁场效果输出一个低电平,当路程表转子的齿没有与传感器探头对准,探头中的灵敏器材没有遭到磁场效果而输出高电平。这样变速器输出轴每翻滚一周,路程表传感器就有8 个方波脉冲信号输出,经衔接线束传给车速路程表。由于他没有路程表主、被迫齿轮实践速比与理论速比之间的差错而发生的整车车速与路程的差错,因而车速路程表指示读数较前两种更精确。而且相互触摸的传动部件削减,损坏率与本钱均削减。所以在国内商用车职业正在被推行并广泛运用。
二、速比的核算
关于机械式及传感器设备在路程表被迫齿轮上的车速路程表,路程表被迫齿轮与变速器输出主轴的转速纷歧致,因而,要在车速路程表上反映车速与路程,就需求核算路程表自动齿轮(齿数为Z1)与被迫齿轮(齿数为Z2)之间的传动比,即路程表速比ie。在已知下列参数条件下,才可核算路程表速比:
k:路程表常数———依据信号的类型(软轴的转数或脉冲数),车速路程表每添加1km 路程所有必要承受的信号数的特征量(一般为625 或1000)。例如:轿车每行进1km 软轴旋转1000 圈,则路程表常数为1000。R:轮胎翻滚半径,单位m———依据轮胎规范查阅《轿车规范汇编》中的《GB/T2977-1997》或轮胎供货商供给的产品手册可得。
i0:总减速比(路程表自动齿轮地点轴至车轮反转中心处)。依据路程表常数k 的界说,可得以下公式:

由此可得: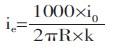
由于路程表速比ie 为路程表自动齿轮与被迫齿轮之间的传动比,即:
由此可得:Z2 = Z1ie
给定路程表自动齿轮齿数Z1后,由上式可核算出路程表被迫齿轮齿数Z2,但这样核算出的Z2 不必定为整数,因而需求圆整,再核算出实践传动比i ,挑选不同的Z1 值(一般取3~9),而且依据《GB7258-2004 机动车安全技能条件》轿车车速表指示车速不得低于实践车速,使i 有必要满意: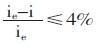
在核算路程表自动齿轮与被迫齿轮的参数时,依据不同的变速器,中心距是必定值,根本齿形法向压力角一般为规范值20°,调整法向模数(一般为1~1.75 之间)及主、被迫齿轮齿顶高系数(一般为0.8 或1.0)和齿根高系数(一般为0.25 或0.3),使被迫齿轮的齿顶圆直径不要超越某一值,以防止和变速器后轴承盖干与,别的,还应留意在主、被迫齿轮的参数中有必要满意以下联系:
被迫齿轮法向曲率半径n2b1>法向渐开线起点曲率半径n2g2———不然路程表自动齿轮的齿
顶与被迫齿轮的过渡曲线干与。
自动齿轮法向曲率半径n1b2>法向渐开线起点曲率半径n1g1———不然路程表被迫齿轮的齿
自动齿轮法向曲率半径n1b2>法向渐开线起点曲率半径n1g1———不然路程表被迫齿轮的齿
顶与自动齿轮的过渡曲线干与。
被迫齿轮法向曲率半径n2b1>0———不然路程表自动齿轮的齿顶圆开始啮合点超越路程表被迫齿轮的极限啮合点,路程表被迫齿轮发生根切现象。
三、结束语
本文介绍了机械式和电子式两种车速路程表的信号设备的结构原理及其优缺陷,并介绍了路程表速比的核算方法及核算时应该留意的问题。信任,跟着轿车工业的开展,车速路程表这一轿车重要部件会向着指读数更精确、差错更小、结构更简略、寿数更长的方向开展。






