


在一些要求呼应速度快、实时性强、操控量多的运用场合,往往理由多个单片机结合PC机组成散布体系,在这样的体系中能够运用RS-485接口衔接单片机和PC机。RS-485是RS-232的改进规范,在通讯速率、传输间隔、多机衔接等方面较RS-232有了很大的进步,在软件设计上和RS-232根本共同。在结合RS-485及有关材料基础上学习了用单片机完成485总线现场监测体系。这个体系以PC机为主机,多个单片机为从机的现场监测体系,单片机组组成的各个节点担任收集终端设备的状况信息,主机以轮询的方法向各个节点获取这些设备信息,并依据信息内容进行相关的操作。
首要器材:
1、PC机端的232/485转化接口:MC1488和MC1489完成TTL电平缓RS-232通讯电平的转化;PC147光电阻隔器材;MAX481485驱动收发芯片。
2、单片机端:AT89C52单片机芯片,用于数据收集和与485总线接口;MAX481485驱动收发芯片;DIP-6开关用于确认本机的设备号。
实验流程图:
主机端流程: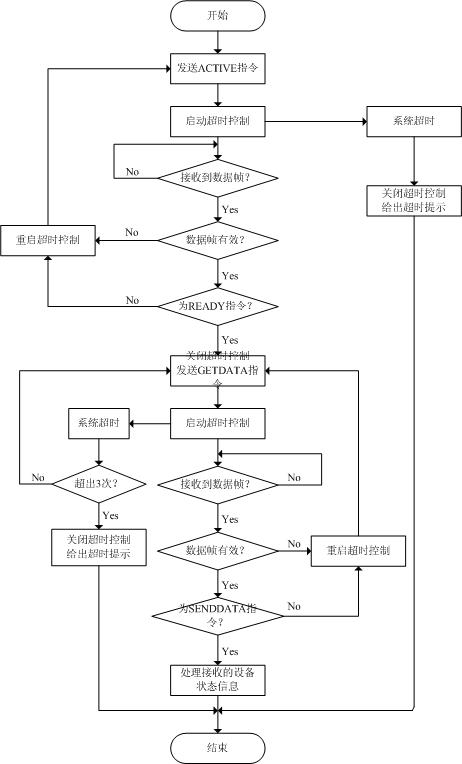
单片机端流程图: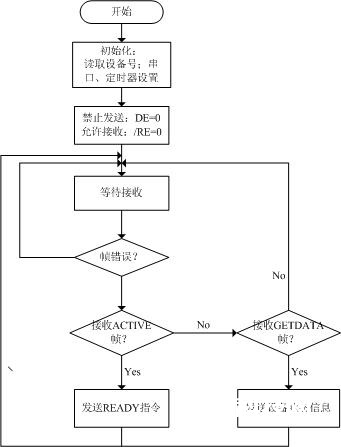
实验电路图:
主机端
单片机端:
实验程序代码:
// 485Mon.h程序
#ifndef_485MON_H//避免485Mon.h被重复引证
#define_485MON_H
#include
#include
#include
#define uchar unsigned char
#define uint unsigned int
#define ACTIVE0x11
#define GETDATA0x22
#define READY0x33
#define SENDDATA0x44
#define RECFRMMAXLEN 16//接纳帧的最大长度,超越此值以为帧超长过错
#define STATUSMAXLEN 10//设备状况信息最大长度
uchar DevNo;//设备号
xdata uchar StatusBuf[STATUSMAXLEN];
//为简化起见,假设了10位固定的收集数据
#define DATA00x10
#define DATA10x20
#define DATA20x30
#define DATA30x40
#define DATA40x50
#define DATA50x60
#define DATA60x70
#define DATA70x80
#define DATA80x90
#define DATA90xA0
sbit DE = P1^6;//驱动器使能,1有用
sbit RE = P1^7;//接纳器使能,0有用
void init();//体系初始化
void Get_Stat();//简化的数据收集函数
bit Recv_Data(uchar *type);//接纳数据帧函数
void Send(uchar m);//发送单字节数据
void Send_Data(uchar type,uchar len,uchar *buf);//发送数据帧函数
void Clr_StatusBuf();//铲除设备状况信息缓冲区函数
#endif
// 485Mon.c程序
#include “485Mon.h”
void main(void)
{
uchar type;
/*初始化*/
init();
while (1)
{
if (Recv_Data(&type)==0)//接纳帧过错或许地址不符合,丢掉
continue;
switch (type)
{
case ACTIVE://主机问询从机是否在位
Send_Data(READY,0,StatusBuf);//发送READY指令
break;
case GETDATA://主机读设备恳求
Clr_StatusBuf();
Get_Stat();//数据收集函数
Send_Data(SENDDATA,strlen(StatusBuf),StatusBuf);
break;
default:
break;//指令类型过错,丢掉当时帧
}
}
}
/*初始化*/
void init(void)
{
P1 = 0xff;
DevNo = (P1&0x00111111);//读取本机设备号
TMOD = 0x20;
SCON = 0x50;
TH1 = 0xfd;
TL1 = 0xfd;
TR1 = 1;
PCON = 0x00;// SMOD=0
EA = 0;
}
/*接纳数据帧函数,实际上接纳的是主机的指令*/
bit Recv_Data(uchar *type)
{
uchar tmp,rCount,i;
uchar r_buf[RECFRMMAXLEN];//保存接纳到的帧
uchar Flag_RecvOver;//一帧接纳完毕标志
uchar Flag_StartRec;//一帧开端接纳标志
uchar CheckSum;//校验和
uchar DataLen;//数据字节长度变量
/*制止发送,答应接纳*/
DE = 0;
RE = 0;
/*接纳一帧数据*/
rCount = 0;
Flag_StartRec = 0;
Flag_RecvOver = 0;
while (!Flag_RecvOver)
{
RI = 0;
while (!RI);
tmp = SBUF;
RI=0;
/*判别是否收到字符$,其数值为0x24 */
if ((!Flag_StartRec) && (tmp == 0x24))
{
Flag_StartRec = 1;
}
if (Flag_StartRec)
{
r_buf[rCount] = tmp;
rCount ++;
/*判别是否收到字符*,其数值为0x2A,依据接纳的指令设置相应标志位*/
if (tmp == 0x2A)
Flag_RecvOver = 1;
}
if (rCount == RECFRMMAXLEN)//帧超长过错,回来0
return 0;
}
接上篇程序:
/*核算校验和字节*/
CheckSum = 0;
DataLen = r_buf[3];
for (i=0;i++;i<3+DataLen)
{
CheckSum = CheckSum + r_buf[i+1];
}
/*判别帧是否过错*/
if (rCount<6)//帧过短过错,回来0,最短的指令帧为6个字节
return 0;
if (r_buf[1]!=DevNo)//地址不符合,过错,回来0
return 0;
if (r_buf[rCount-2]!=CheckSum)//校验过错,回来0
return 0;
*type = r_buf[2];//获取指令类型
return 1;//成功,回来1
}
/*发送数据帧函数*/
void Send_Data(uchar type,uchar len,uchar *buf)
{
uchar i,tmp;
uchar CheckSum = 0;
/*答应发送,制止接纳*/
DE = 1;
RE = 1;
/*发送帧开始字节*/
tmp = 0x24;
Send(tmp);
Send(DevNo);//发送地址字节,也即设备号
CheckSum = CheckSum + DevNo;
Send(type);//发送类型字节
CheckSum = CheckSum + type;
Send(len);//发送数据长度字节
CheckSum = CheckSum + len;
/*发送数据*/
for (i=0;i { Send(*buf); CheckSum = CheckSum + *buf; buf++; }
Send(CheckSum);//发送校验和字节
/*发送帧完毕字节*/
tmp = 0x2A;
Send(tmp);
}
/*收集数据函数通过简化处理,取固定的10个字节数据*/
void Get_Stat(void)
{
StatusBuf[0]=DATA0;
StatusBuf[1]=DATA1;
StatusBuf[2]=DATA2;
StatusBuf[3]=DATA3;
StatusBuf[4]=DATA4;
StatusBuf[5]=DATA5;
StatusBuf[6]=DATA6;
StatusBuf[7]=DATA7;
StatusBuf[8]=DATA8;
StatusBuf[9]=DATA9;
}
/*发送单字节数据*/
void Send(uchar m)
{
TI = 0;
SBUF = m;
while(!TI);
TI = 0;
}
/*铲除设备状况信息缓冲区函数*/
void Clr_StatusBuf(void)
{
uchar i;
for (i=0;i StatusBuf[i] = 0; }






